© Danfoss | August 2018 AQ00000211 | 125
The range is from 0 to 100 km/h for P3479 to P3483 and from 0 to 200 [%] for P3473 to P3478.
GPS2
The range is from 0 to 100 km/h for P3491 to P3495 and from 0 to 200 [%] for P3485 to P3490.
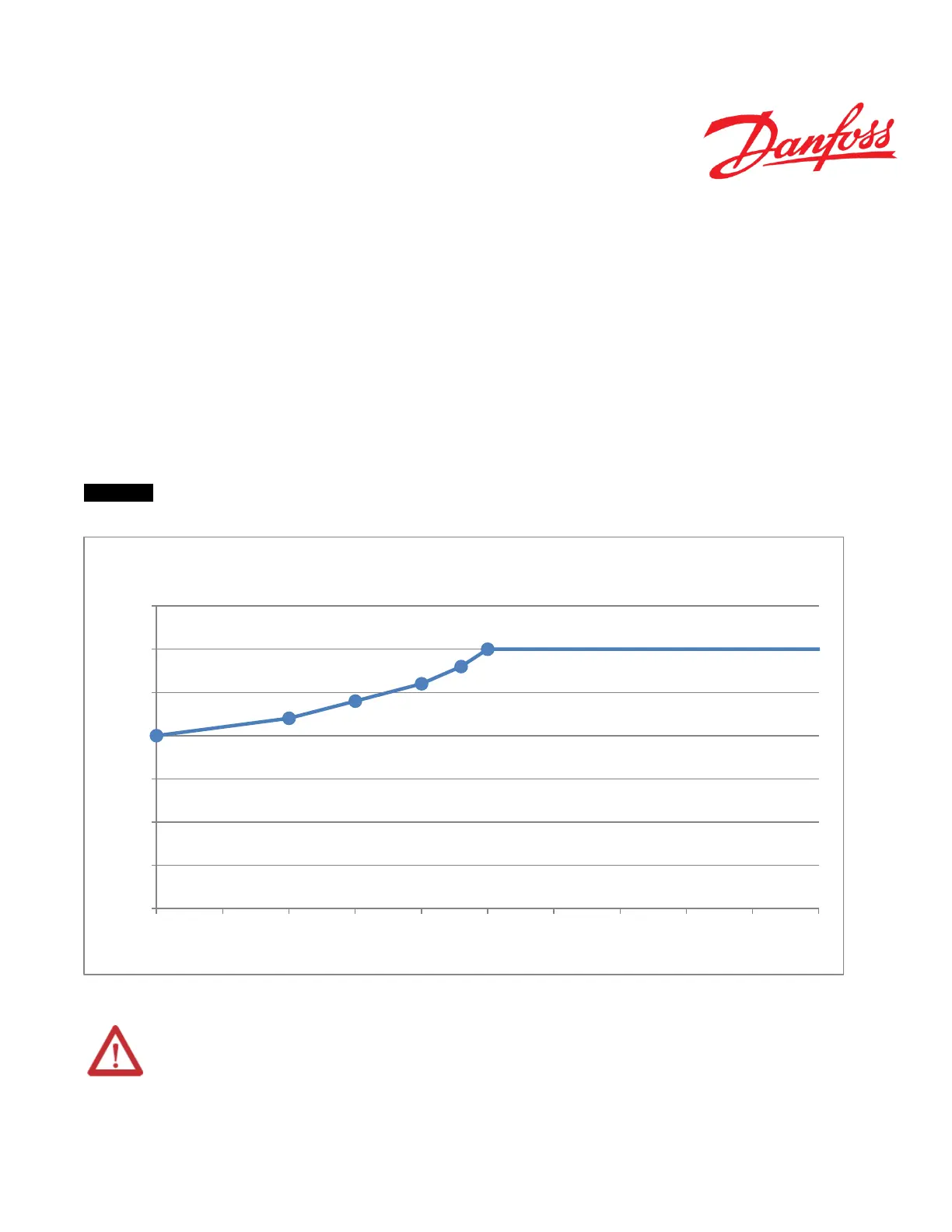
These parameters represent the six points on the curve below (Point P, Q, R, S, T and U). The Auto-guidance algorithm
will make linear interpolation in between each of the six points. It is allowed to move the six points in any direction,
limited by the following rules:
• Point P is always specified at Vehicle speed = 0 km/h
• The Vehicle speed has to increase for each point, hence “Vehicle speed” for Point P < “Vehicle speed” for Point
Q AND “Vehicle speed” for Point Q < “Vehicle speed” for Point R AND “Vehicle speed” for Point R < “Vehicle
speed” for Point S etc.…
• Point U “Closed loop gain” is valid for Point U “Vehicle speed” and vehicle speeds above Point U “Vehicle
speed”
Important
Danfoss recommends using fixed gain. Use speed dependent gain only if necessary.
Figure 67
Warning
Setting the closed loop gain at a to high level could give unwanted aggressive steering behavior in auto-guidance
mode, especially in combination with a low vehicle speed this could lead to unwanted aggressive steering behavior
when acquiring a line!
Point P
Point Q
Point R
Point S
Point T
Point U
0
5
10
15
20
25
30
35
0 5 10 15 20 25 30 35 40 45 50
Closed loop gain [%]
Vehicle speed [km/h ]
GPS - Vehicle speed dependent closed loop control

 Loading...
Loading...









