GD200A series VFD Function parameters
-85-
Proportional
gain at low
frequency (Kp)
PID command
of ACC/DEC
time
P10 Group Simple PLC and multi-step speed control
0: Stop after running once. The VFD has to be
commanded again after finishing a cycle.
1: Run at the final value after running once. After
finish a signal, the VFD will keep the running
frequency and direction of the last run.
2: Cycle running. The VFD will keep on running
until receiving a stop command and then, the
system will stop.
0: Power loss without memory
1: Power loss memory; PLC record the running
step and frequency when power loss.
100.0% of the frequency setting corresponds to
the max. frequency P00.03.
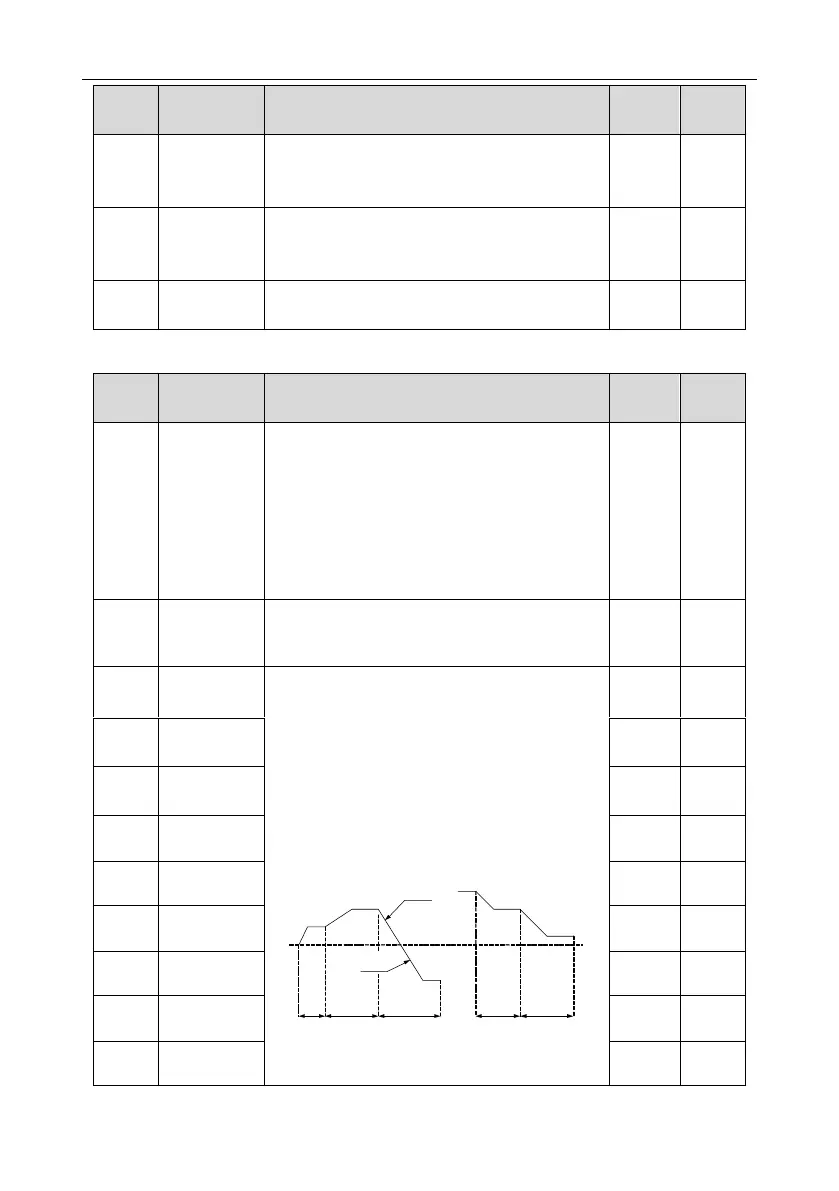
When selecting simple PLC running, set
P10.02–P10.33 to define the running frequency
and direction of all steps.
Note: The symbol of multi-step determines the
running direction of simple PLC. The negative
value means reverse rotation.
P10.04
P10.02
P10.03
P10.05 P10.07
P10.06
P10.31 P10.33
P10.32
ACC time
2 stages
DEC time
2 stages
P10.30
P10.28
Multi-step speeds are in the range of --f
max
–f
max
and it can be set continuously.
 Loading...
Loading...