GD200A series VFD Function parameters
-48-
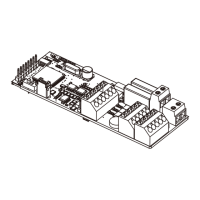
1
5
12
60
116%
200%
Time (min)
Current overload
multiple
150% 180%
Setting range: 20.0%–120.0%
Correction
coefficient of
motor 1 power
Correct the power displaying of motor 1.
Only impact the displaying value other than the
control performance of the VFD.
Setting range: 0.00–3.00
P03 Group Vector control
Speed loop
proportional
gain1
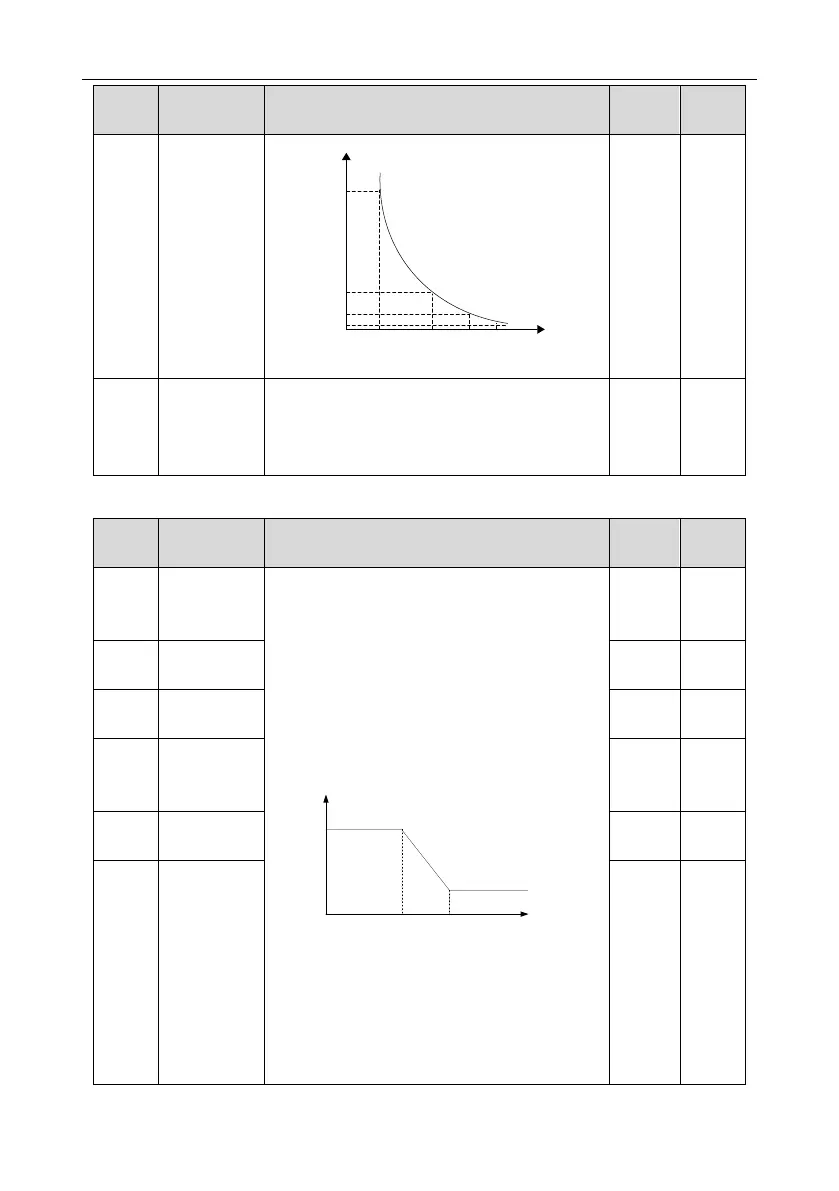
The parameters P03.00–P03.05 only apply to
vector control mode. Below the switching
frequency 1 (P03.02), the speed loop PI
parameters are: P03.00 and P03.01. Above the
switching frequency 2 (P03.05), the speed loop PI
parameters are: P03.03 and P03.04. PI
parameters are gained according to the linear
change of two groups of parameters. It is shown
as below:
PI parameters
Output frequency
(P03.00,P03.01)
(P03.03,P03.04)
P03.02 P03.05
Setting the proportional coefficient and integral
time of the adjustor can change the dynamic
response performance of vector control speed
loop. Increasing the proportional gain and
decreasing the integral time can speed up the
dynamic response of the speed loop. But too high
Speed loop
integral time1
Speed loop
proportional
gain 2
Speed loop
integral time 2
 Loading...
Loading...