3-54
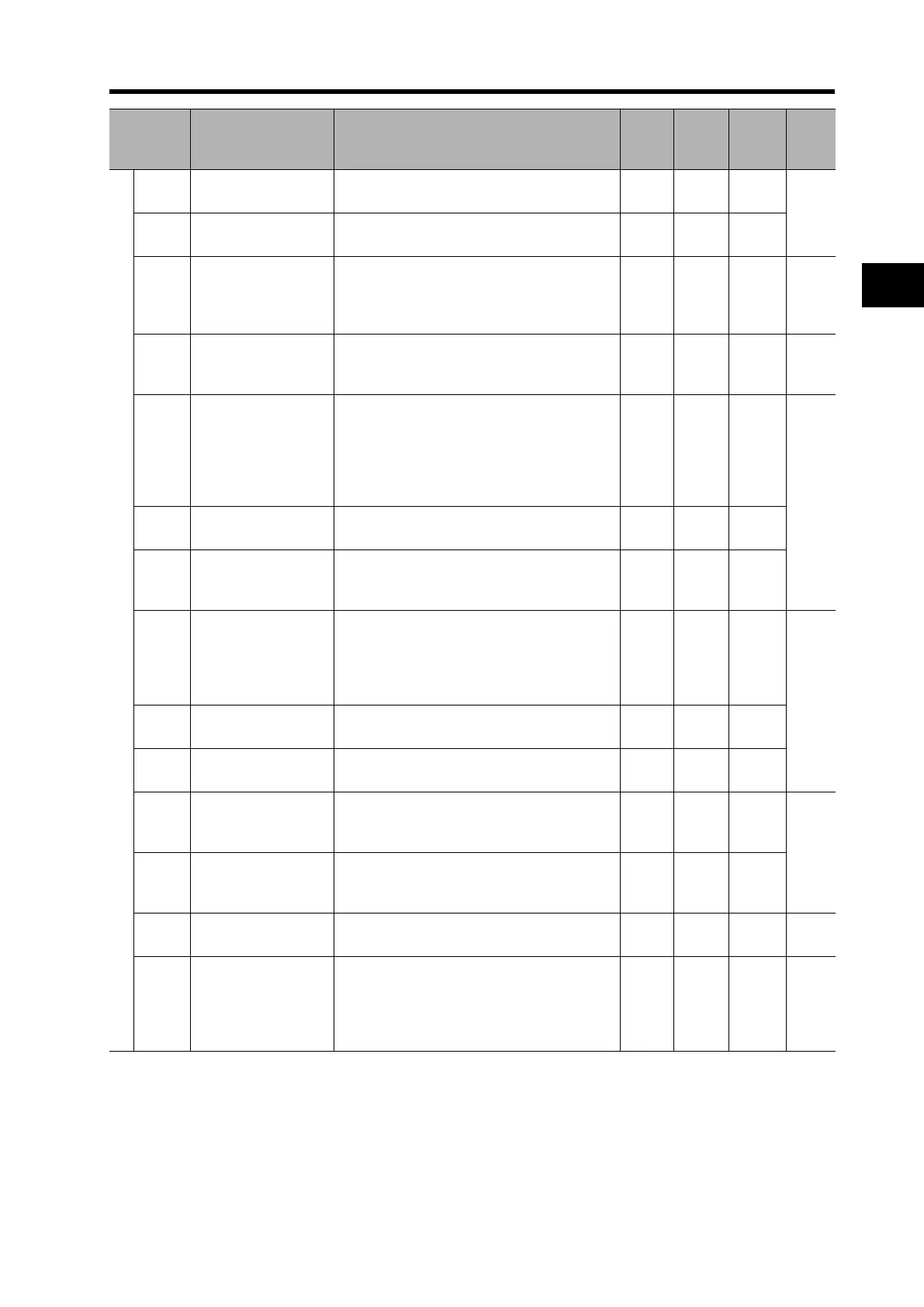
3-9 Parameter List
3
Operation
Options
P028
Motor gear ratio
numerator
1 to 9999 1 No
4-133
P029
Motor gear ratio
denominator
1 to 9999 1 No
P031
Acceleration/
deceleration time
input type
00: OPE (Digital Operator)
01: Option 1
02: Option 2
03: EzSQ (Drive Programming)
00 No 4-8
P032
Orientation stop
position input type
00: OPE (Digital Operator)
01: Option 1
02: Option 2
00 No
P033
Torque reference
input selection
00: O (Terminal O)
01: OI (Terminal OI)
02: O2 (Terminal O2)
03: OPE (Digital Operator)
06: Option 1
07: Option 2
00 No
4-126
P034
Torque reference
setting
0 to 200 (0.4 to 55 kW)
0 to 180 (75 to 132 kW)
0Yes%
P035
Polarity selection at
torque reference via
O2
00: Sign (Signed)
01: Direction (Depends on the RUN direction)
00 No
P036 Torque bias mode
00: OFF (None)
01: OPE (Digital Operator)
02: O2 (Terminal O2)
05: Option 1
06: Option 2
00 No
4-126
4-127
P037 Torque bias value
-200 to +200 (0.4 to 55 kW)
-180 to +180 (75 to 132 kW)
0Yes%
P038
Torque bias polarity
selection
00: Sign (Signed)
01: Direction (Depends on the RUN direction)
00 No
P039
Speed limit value in
torque control
(forward)
0.00 to Maximum frequency 0.00 Yes Hz
4-126
P040
Speed limit value in
torque control
(reverse)
0.00 to Maximum frequency 0.00 Yes Hz
P044
DeviceNet comm
Watch dog timer
0.00 to 99.99 1.00 No s
P045
Operation setting at
communications error
00: Trip
01: Decel-Trip (Trip after deceleration stop)
02: Ignore
03: Free RUN
04: Decel-Stop (Deceleration stop)
00 No
Parameter
No.
Function name Monitor or data range
Default
setting
Changes
during
operation
Unit Page
* 2nd/3rd control is displayed when "SET(08)/SET3(17)" is allocated to one of multi-function inputs from C001
to C008.

 Loading...
Loading...







