4-135
4-3 Functions When PG Option Board (3G3AX-PG01) Is Used
4
Functions
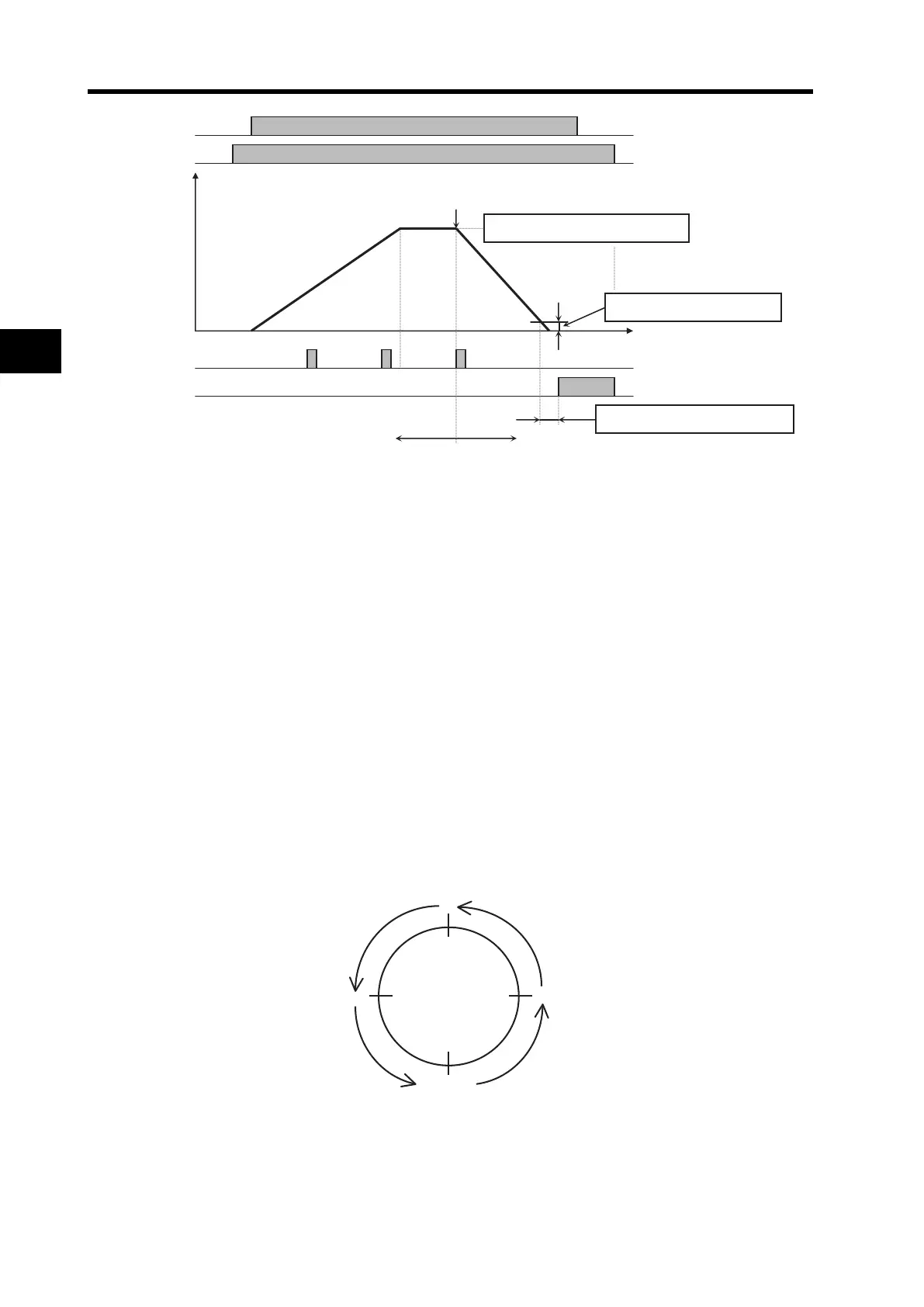
(1) When the RUN command is turned on with the ORT terminal turned on, the Inverter accelerates to the
orientation speed (P015), and then performs constant speed operation.
(If the RUN command is turned on during operation, the operation speed changes to the orientation speed
when the ORT terminal is turned on.)
(2) After the orientation speed is reached, the Inverter shifts to the position control mode when the first Z-pulse
is detected.
(3) During forward run, position control is performed with a target value of "Orientation stop position (P014) + one
rotation"; During reverse run, with a target value of "Orientation stop position (P014) + two rotations".
In this step, the higher the position loop gain (P023), the shorter the deceleration time (regardless of the
deceleration time setting).
(4) After the remaining number of pulses reaches the position ready range setting (P017), the Inverter outputs
the POK signal after the position ready delay time setting (P018) elapses. (The POK output remains until the
ORT signal is turned off.)
After positioning is completed, the servo lock status remains until the RUN command is turned off.
Note 1: Do not set a high frequency for the orientation speed, because positioning must be completed within two
rotations during deceleration. Otherwise, overvoltage protection may cause a trip.
Note 2: Orientation stop position is defined as 4096 (0 to 4095) divisions of one forward rotation from the
reference point. (The number of divisions is fixed to 4096, regardless of the encoder's number of pulses.)
The reference point is defined as the point where the pulse is input between EZP and EZN. Below is the
layout of the stop target position. (Positive-phase connection)
Orientation stop position conceptual drawing
RUN commands (FW/RV)
ORT terminal
Z pulse
Output
frequency
Orientation speed setting (P015)
ON
ON
ONPOK signal
Position ready range setting (P017)
Position ready delay time setting (P018)
Speed control Position control
(1)
(2)
(3)
(4)
Position of Z pulse
Reference point
0
1024
3072
2048
Motor shaft viewed from motor
shaft load side

 Loading...
Loading...







