Rockwell Automation Publication 750-AT006D-EN-P - January 2022 23
Chapter 1 Background
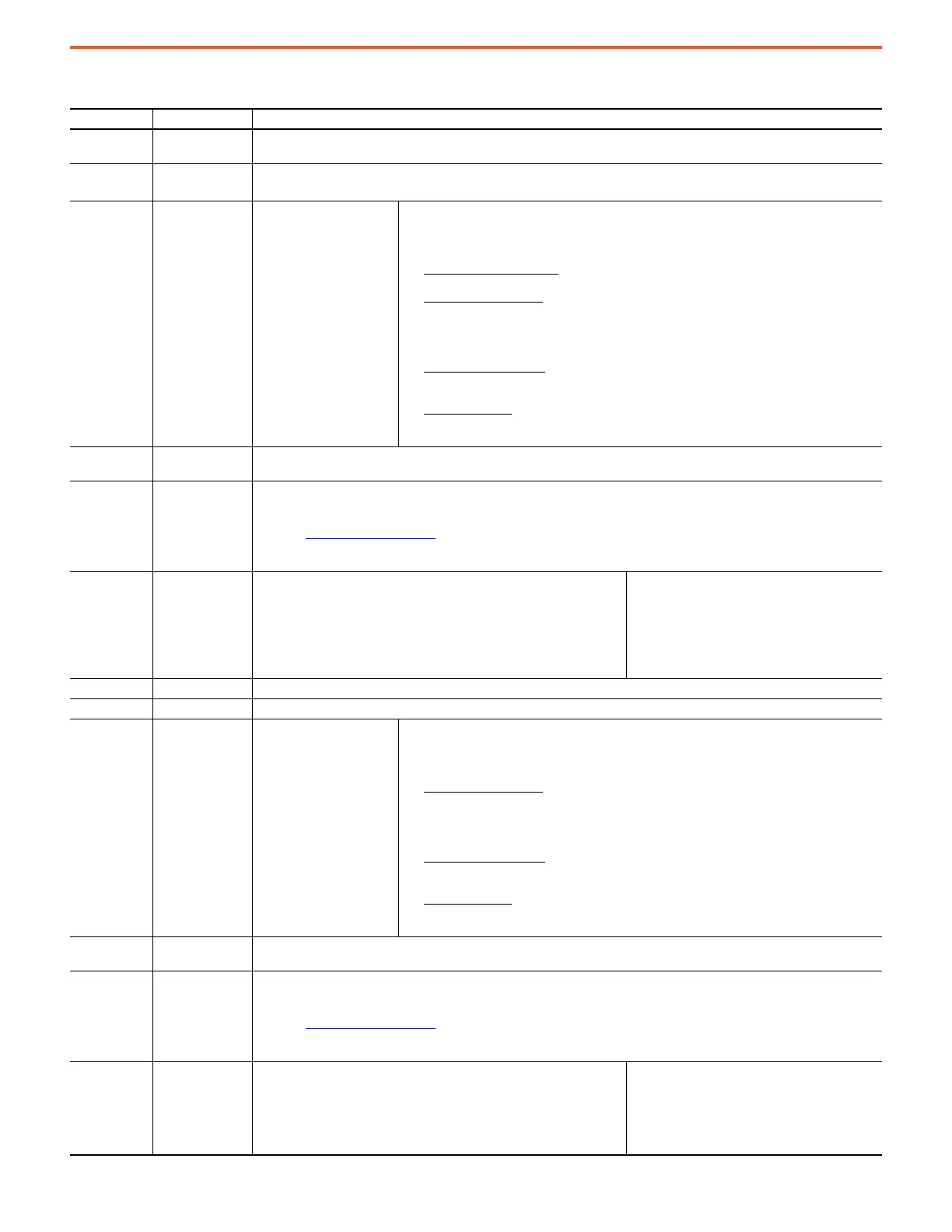
Table 4 - Velocity Feedback Filter Parameters
Parameter No. Parameter Name Description
10:1000 [Pri Vel Fb Sel]
Enter the 2-digit port location followed by the 4-digit parameter number of the primary feedback device. For encoderless operation,
10:1048 [Open Loop Virtual Encoder] is selected as primary velocity feedback.
10:1001 [Vel Fb Taps]
Sets the number of primary FIR taps used to calculate velocity as the derivative of position over a sample time corresponding to 2
n
number of taps.
10:1002 [c Vel Fb LPF BW]
Automatically calculated for
the primary velocity
feedback low pass filter
bandwidth.
It is applied to the drive when
10:905 [System C/U Select] =
Calculated (0).
It is calculated as a function
of the listed parameters and
it affects the DMTC and
10:906 [System BW] values.
• 10:407 [Motor Poles] – This parameter is the number of motor poles (p). It is calculated as follows:
– p = round (120 x [Motor NP Hertz] / [Motor NP RPM])
• Primary Encoder Resolution – This parameter is the total resolution in edge counts per revolution
(EPR) specified by parameters on the primary feedback option card.
– Primary Encoder Resolution:
The total resolution in edge counts per revolution (EPR) specified
by parameters on the primary feedback option card.
– Low-Resolution Example: Resolution = 1024 pulses per revolution * 4 quadrature edge counts
per pulse = 4096 EPR (12-bit). The low-resolution PPR comes directly from a parameter on the
option card. When both A and B channels are selected for an incremental encoder, the edge
count multiplier is 4. This value is the typical and default setting. When only channel A is
selected, then the edge count multiplier is 2.
– High-Resolution Example: Resolution = 1024 pulses per revolution * 1024 edge counts per pulse =
1,048,576 EPR (20-bit). For high-resolution devices, the overall resolution choices are 20-bit
default or an optional 24-bit when the corresponding configuration bit is selected.
– Encoderless Mode: If the primary feedback (10:1000 [Pri Vel Fb Sel] is set to Open Loop Velocity
Feedback, 10:1002 [c Vel Fb LPF BW] will be set to 10 Hz when 10:905 [System C/U Select] =
Calculated (0).
10:1003 [u Vel Fb LPF BW]
Sets the primary velocity feedback low pass filter bandwidth.
This value is applied to the drive when 10:905 [System C/U Select] = User Entered (1).
10:1004 [c Vel Fb LPF Gn]
Displays the calculated value of the primary velocity feedback filter gain. This gain value is applied when parameter 10:905 [System
C/U Sel] is set to Calculated (0).
The calculated filter gain is always zero. Because this is a Lead Lag Filter, a filter gain of zero will configure the filter as a Low Pass
Filter. See Lead Lag Filters
on page 52.
This filter determines the amount of filtering applied to the primary velocity feedback channel and is only active in Flux Vector
motor control modes.
10:1005 [u Vel Fb LPF Gain]
Sets the primary velocity feedback filter gain. The parameter's value sets the
mode of the filter and gain of its first order transfer function.
• Value is applied when parameter 10:905 [System C/U Sel] is set to User
Entered (1).
• Value affects the filtering applied to the primary velocity feedback channel
and is only active in Flux Vector motor control modes. Entering a value of 1
turns off the filter.
• For a low pass filter, enter a value of 0. This is the
user default and the calculated gain value.
• For a lag-lead filter, enter a value between 0 and 1.
• For a lead-lag filter, enter a value greater than 1.
10:1006 [Alt Vel Fb Sel] Enter the 2-digit port location followed by the 4-digit parameter number of the alternate feedback device.
10:1007 [Alt Vel Fb Taps] Sets the number of alternate FIR taps used to calculate the derivative of position
10:1008 [c AltVelFbLPF BW]
Automatically calculated for
the alternate velocity
feedback low pass filter
bandwidth. It is applied to the
drive when 10:905 [System C/
U Select] = Calculated (0).
It is calculated as a function
of the listed parameters and
it affects the DMTC and
10:1010 [Alt Fb GnScale]
values.
• 10:407 [Motor Poles] – This parameter is the number of motor poles (p). It is calculated as follows:
– p = round (120 x [Motor NP Hertz] / [Motor NP RPM])
• Alternate Encoder PPR and Configuration – This parameter is the total resolution in edge counts
per revolution (EPR) specified by parameters on the alternate feedback option card.
– Low-Resolution Example:
Resolution = 1024 pulses per revolution * 4 quadrature edge counts
per pulse = 4096 EPR (12-bit). The low-resolution PPR comes directly from a parameter on the
option card. When both A and B channels are selected for an incremental encoder, the edge
count multiplier is 4. This value is the typical and default setting. When only channel A is
selected, then the edge count multiplier is 2.
– High-Resolution Example: Resolution = 1024 pulses per revolution * 1024 edge counts per pulse =
1,048,576 EPR (20-bit). For high-resolution devices, the overall resolution choices are 20-bit
default or an optional 24-bit when the corresponding configuration bit is selected.
– Encoderless Mode: If the alternate feedback (10:1006 [Alt Vel Fb Sel] is set to Open Loop Velocity
Feedback, 10:1002 [c Vel Fb LPF BW] will be set to 10 Hz when 10:905 [System C/U Select] =
Calculated (0). 10 Hz = 5 times system bandwidth.
10:1009 [u AltVelFbLPF BW]
Sets the alternate velocity feedback low pass filter bandwidth.
This value is applied when 10:905 [System C/U Select] = User Entered (1).
10:1021 [c AltVelFbLPF Gn]
Displays the calculated value of the alternate velocity feedback filter gain. This gain value is applied when parameter 10:905
[System C/U Sel] is set to 'Calculated' (0).
The 'calculated' filter gain is always zero. Because this is a Lead Lag Filter, a filter gain of zero will configure the filter as a Low Pass
Filter. See Lead Lag Filters
on page 52.
This filter determines the amount of filtering applied to the alternate velocity feedback channel and is only active in Flux Vector
motor control modes.
10:1022 [u AltVelFbLPF Gn]
Sets the alternate velocity feedback filter gain. This parameter's value sets
the mode of the filter and gain of its first order transfer function.
• Value determines the amount of filtering applied to the alternate velocity
feedback channel and is only active in Flux Vector motor control modes.
• Entering a value of 1 turns off the filter.
• For a low pass filter, enter a value of 0. This is the
user default and the calculated gain value.
• For a lag-lead filter, enter a value between 0 and 1.
• For a lead-lag filter, enter a value greater than 1.
– This value is applied when parameter 10:905
[System C/U Sel] is set to 'User Entered' (1).
 Loading...
Loading...


