8.10 Jogging
Overview
The "Jog" function is typically used to temporarily move a motor using local control
commands.
Requirement
The OFF1 command must be active. With an active ON command, the converter ignores the
commands "Jogging1" and "Jogging2".
Function description
5HDG\WRVZLWFKRQ
2SHUDWLRQ
QRMRJJLQJ-RJJLQJ
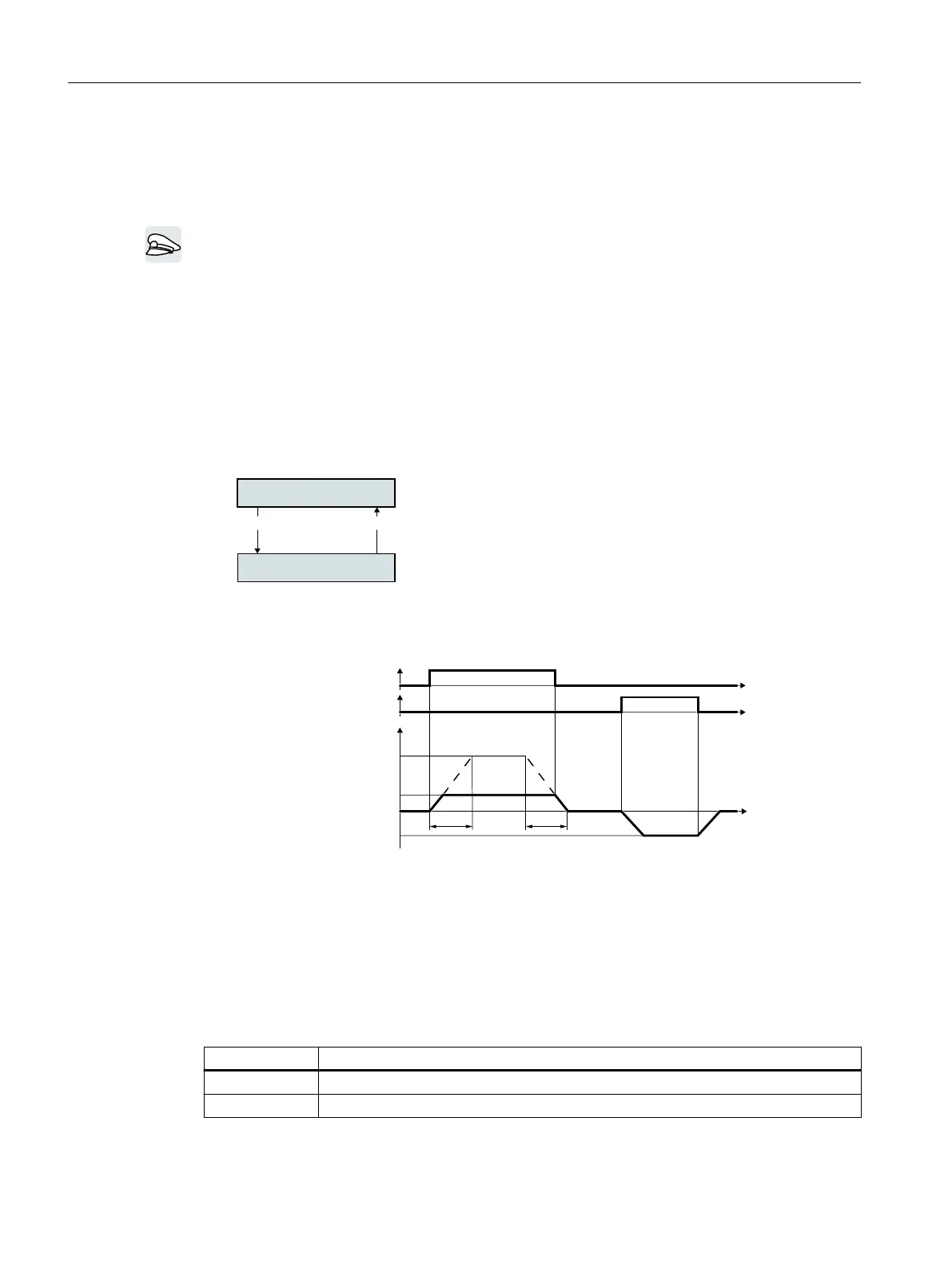
Commands "Jog1" or "Jog2" switch the motor on and o.
The commands are only active when the converter is in the "Ready for switching on" state.
0RWRUVSHHG
0D[LPXPVSHHG
-RJJLQJ
6HWSRLQWMRJJLQJ
6HWSRLQWMRJJLQJ
-RJJLQJ
S
S
S
W
W
W
SS
Figure8-22 Behavior of the motor when "jogging"
After switching on, the motor accelerates to the setpoint, jog1 or setpoint, jog2. The two
dierent setpoints can, for example, be assigned to motor clockwise and counter-clockwise
rotation.
When jogging, the same ramp-function generator is active as for the ON/OFF1 command.
Example
Parameter Description
p1055 = 722.0 Jogging bit 0: Select jogging1 via digital input0
p1056 = 722.1 Jogging bit 1: Select jogging2 via digital input1
Advanced commissioning
8.10Jogging
SINAMICS G120C Converters
240 Operating Instructions, 02/2023, FW V4.7 SP14, A5E34263257B AK
 Loading...
Loading...











