3.5.2 Function test of mode switch
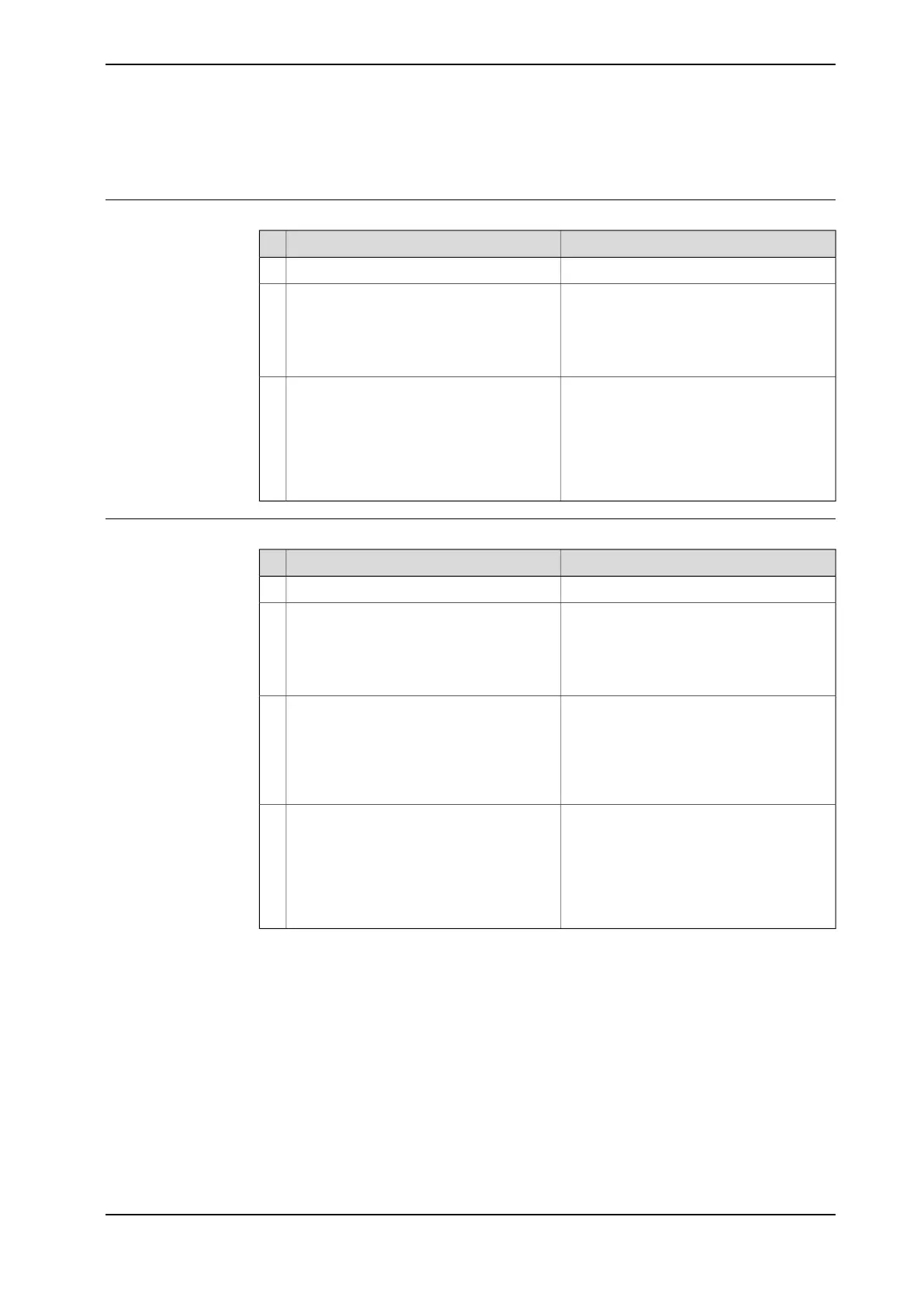
2-position mode switch
NoteAction
Start the robot system.1
This test is passed if it is possible to run
the robot in auto mode.
Start with the mode switch in manual mode
and then switch the mode switch to auto
mode. Run the robot in auto mode.
2
If it is not possible to run the robot in auto
mode, this test is failed and the root cause
of the failure must be found.
This test is passed if the event message
“10015 Manual mode selected” appears in
the FlexPendant log.
Switch the mode switch to manual mode.3
If the event message “10015 Manual mode
selected” is not shown in the FlexPendant
log, the test failed and the root cause of
the failure must be found.
3-position mode switch
NoteAction
Start the robot system.1
This test is passed if it is possible to run
the robot in auto mode.
Start with the mode switch in manual mode
and then switch the mode switch to auto
mode. Run the robot in auto mode.
2
If it is not possible to run the robot in auto
mode, this test is failed and the root cause
of the failure must be found.
This test is passed if it is possible to run
the program in manual full speed mode.
Switch the mode switch to manual full
speed mode. Run the program in manual
full speed mode.
3
If it is not possible to run the program in
manual full speed mode, this test is failed
and the root cause of the failure must be
found.
This test is passed if the event message
“10015 Manual mode selected” appears in
the FlexPendant log.
Switch the mode switch to manual mode.4
If the event message “10015 Manual mode
selected” is not shown in the FlexPendant
log, the test failed and the root cause of
the failure must be found.
Product manual - IRC5 Compact 119
3HAC047138-001 Revision: G
© Copyright 2009-2017 ABB. All rights reserved.
3 Maintenance
3.5.2 Function test of mode switch

 Loading...
Loading...









