2.6.9 Programmable stop functions
Stopping functions
There are different methods to stop the robot, in addition to manually initiated
stops.
• Stop with system input signals
• Stop with RAPID instructions
• Other stops
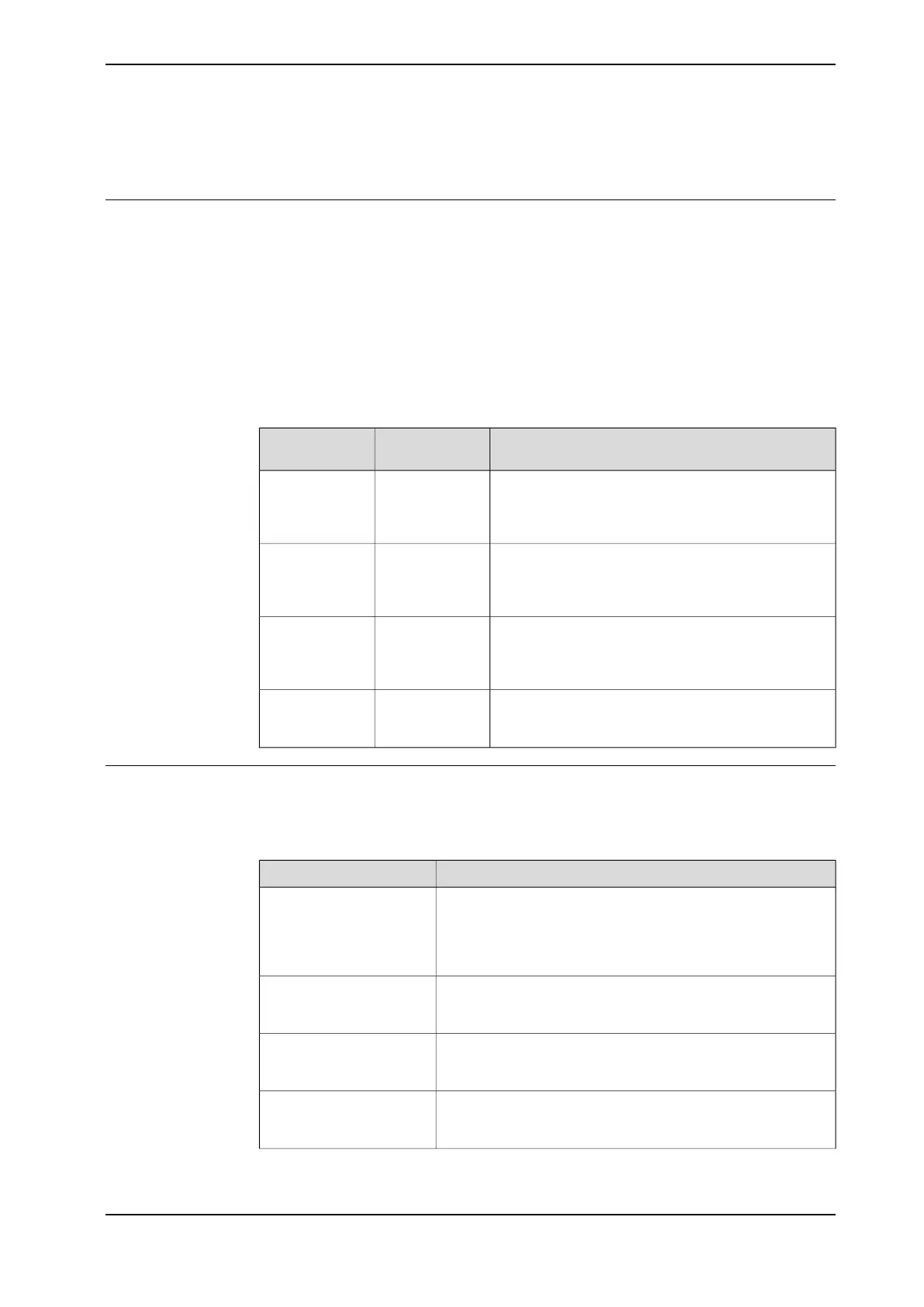
Stop category configuration
The stop category can be configured, see Technical reference manual - System
parameters.
DescriptionSystem paramet-
er Function
Safety inputs
SoftAS can be used to configure the protective stop
in automatic mode either as stop category 0 or cat-
egory 1. The default configuration is TRUE (stop cat-
egory 1).
SoftASAutomatic Stop
SoftGS can be used to configure the protective stop
in automatic and manual mode, either as stop category
0 or category 1. The default configuration is TRUE
(stop category 1).
SoftGSGeneral Stop
SoftSS can be used to configure the protective stop
in automatic and manual mode, either as stop category
0 or category 1. The default configuration is TRUE
(stop category 1).
SoftSSSuperior Stop
SoftES is used to configure the emergency stop in
automatic and manual mode. The default configuration
is FALSE (stop category 0).
SoftESEmergency Stop
Stop with system input signals
In the control system, it is possible to define system input signals to be set/reset
through different interactions, for example, through networks, I/O blocks, RobAPI,
etc. See Application manual - Controller software IRC5.
DescriptionPre-defined system input
The RAPID program execution is stopped, and the manipulator
is stopped on path with no deviation. The RAPID program
cannot be started when this system input signal is high. This
stop is similar to a normal program stop using stop button on
the FlexPendant.
Stop
This is a faster stop of the manipulator than Stop. This stop is
more stressing for the mechanics than normal stop, therefore
there might be a minor deviation on path.
SoftStop
This is a faster stop of the manipulator than Stop and SoftStop.
This stop is more stressing for the mechanics than normal stop
or SoftStop, therefore there might be a deviation on path.
QuickStop
Stops the RAPID program when the complete program is ex-
ecuted, that means when the last instruction in the main routine
has been completed.
Stop at End of Cycle
Continues on next page
Product manual - IRC5 Compact 85
3HAC047138-001 Revision: G
© Copyright 2009-2017 ABB. All rights reserved.
2 Installation and commissioning
2.6.9 Programmable stop functions