Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019 159
Chapter 8
Configuration Examples for a Kinetix Drive
This chapter provides typical axis-configuration examples when using
Kinetix® 350, Kinetix 5500, Kinetix 6500, and Kinetix 5700 drives. The
differences between the Kinetix drives are noted where applicable.
Kinetix 5700 drive configurations are similar to the examples in this chapter.
For more examples of how to configure the Kinetix 5700 drive, see the Kinetix
5700 Servo Drives User Manual, publication 2198-UM002
.
Example 1: Position Loop
with Motor Feedback Only
In this example, you create an AXIS_CIP_DRIVE and a Kinetix 6500 drive,
which includes the control module and a power structure. You then connect
the motor feedback cable to the Motor Feedback port of the Kinetix 6500
drive.
1. Once you have created an AXIS_CIP_DRIVE, open the Axis
Properties.
2. From the Axis Configuration pull-down menu, choose Position Loop.
3. From the Feedback Configuration pull-down menu, choose Motor
Feedback.
The axis and feedback configurations determine the control mode.
For more information on the control modes, see the Integrated Motion on the
EtherNet/IP network Reference Manual, publication MOTION-RM003
.
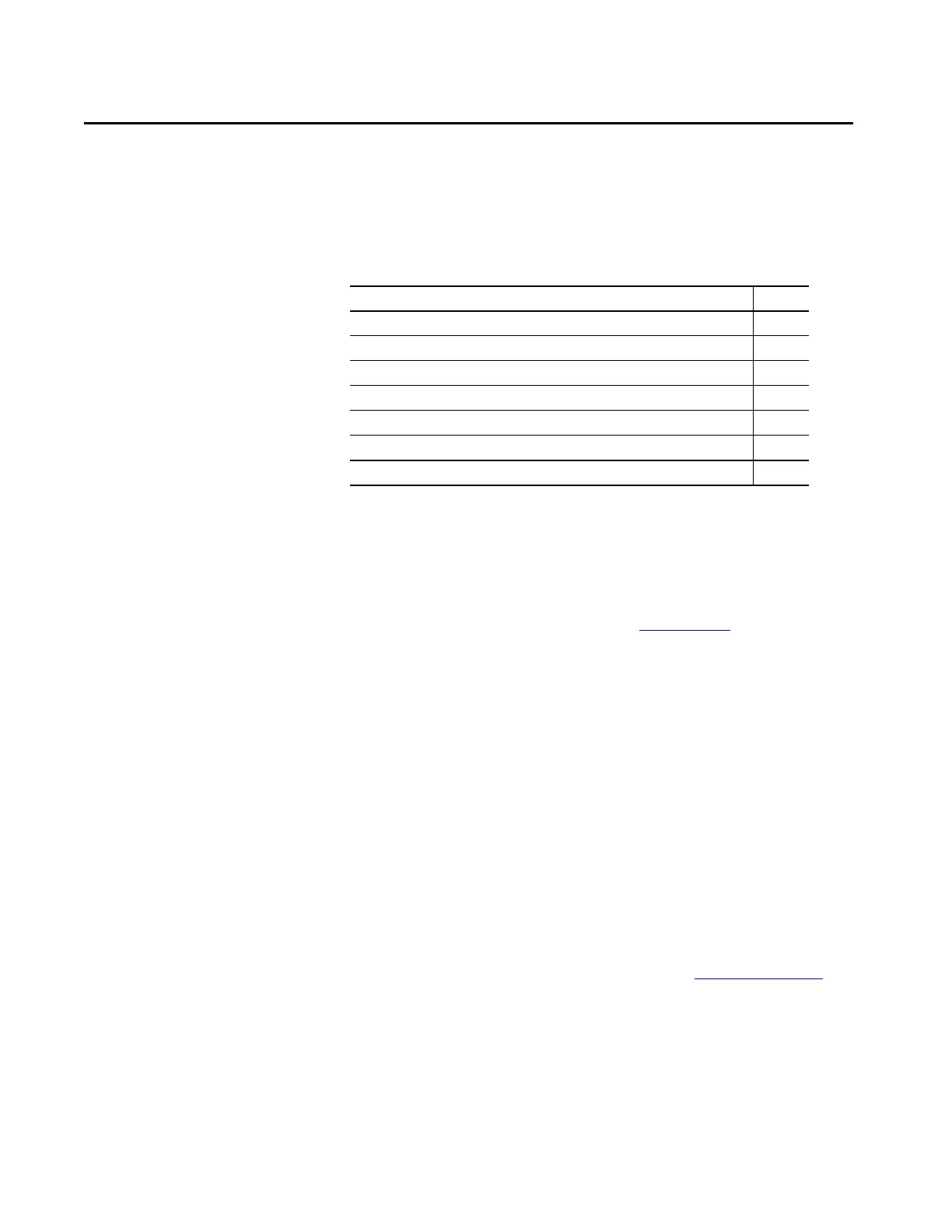
Topic Page
Example 1: Position Loop with Motor Feedback Only 159
Example 2: Position Loop with Dual Feedback 163
Example 3: Feedback Only 167
Example 4: Kinetix 5500 Drive, Velocity Loop with Motor Feedback 172
Example 5: Kinetix 350 Drive, Position Loop with Motor Feedback 176
Example 6: Kinetix 5700 Drive, Frequency Control with No Feedback 180
Example 7: 842E-CM Integrated Motion Encoder with Master Feedback 183

 Loading...
Loading...





