50 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 3 Configure Integrated Motion Control Using Kinetix Drives
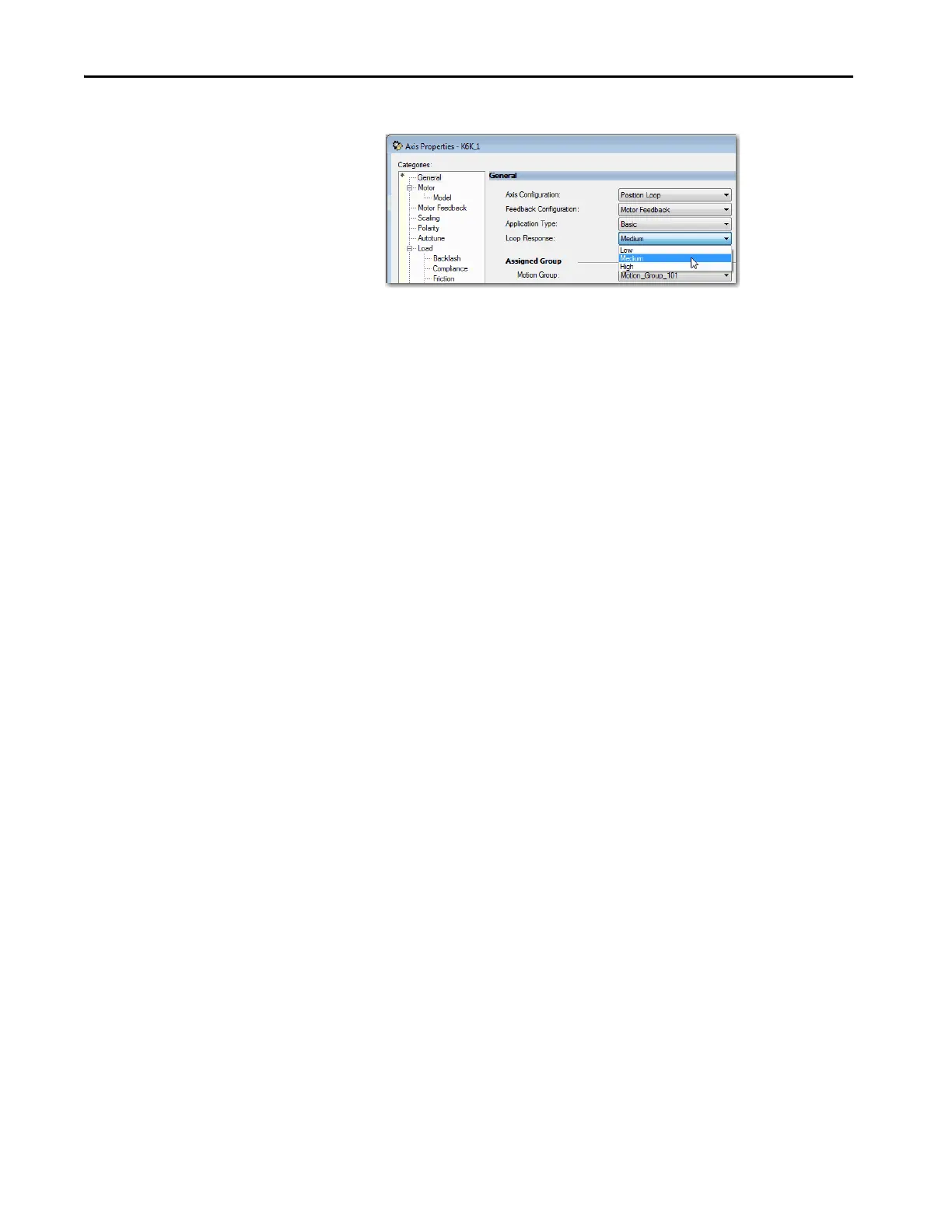
5. Choose a Loop Response, if applicable.
Specify the Motor Data
Source
The Motor Data Source is where you tell the axis where the motor
configuration values are originating. You can select a motor by catalog number
from the Motion Database. You can enter motor data from a nameplate or data
sheet, or use the motor data that is contained in the drive or motor nonvolatile
memory.
On the Motor dialog box you specify what motor you want to use and where
the data is coming from:
• Specify a motor with the Data Source = Nameplate data sheet.
• Specify a motor with the Data Source = Catalog Number.
• Select a motor with the Data Source = Motor NV.
TIP Loop Response settings also impact the calculations that are made that
can minimize the need for you to perform an Autotune or a Manual Tune.
The loop response impacts the spacing between the position and
velocity loops and the proportional and integral gains. This response
impacts how aggressively a given profile is tracked.

 Loading...
Loading...





