306 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Appendix B Out of Box Configuration for PowerFlex Drives
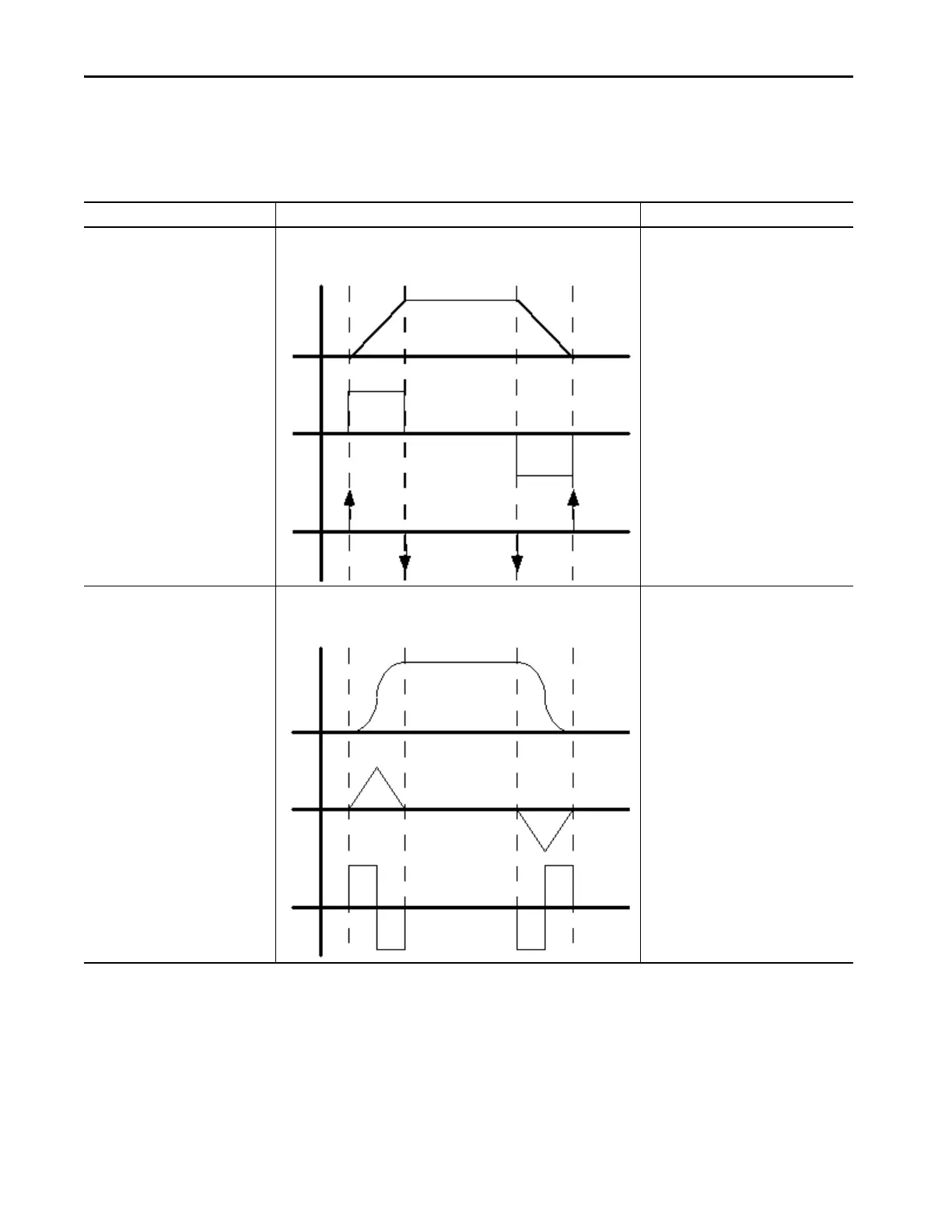
Choose a Profile
Consider cycle time and smoothness when you choose a profile.
If You Want Choose This Profile Consideration
• Fastest acceleration and deceleration
times
• More flexibility in programming
subsequent motion
Trapezoida l Je rk doesn’t limit the acceleration and
deceleration time:
• The Acceleration and Deceleration rates
control the maximum change in Velocity.
• Your equipment and load get more stress
than with an S-curve profile.
• Jerk is considered infinite and is shown as a
vertical line.
Smoother acceleration and deceleration
that reduces the stress on the equipment
and load
S-curve Jerk limits the acceleration and deceleration
time:
• It takes longer to accelerate and decelerate
than a trapezoidal profile.
• If the instruction uses an S-curve profile,
the controller calculates acceleration,
deceleration, and jerk when you start the
instruction.
• The controller calculates triangular
acceleration and deceleration profiles.
Velocity
Accel
Jerk
Time
Time
Time
VelocityAccel
Jerk
Time
Time
Time

 Loading...
Loading...





