VFD-V Series
DELTA ELECTRONICS, INC. ALL RIGHTS RESERVED
5-78
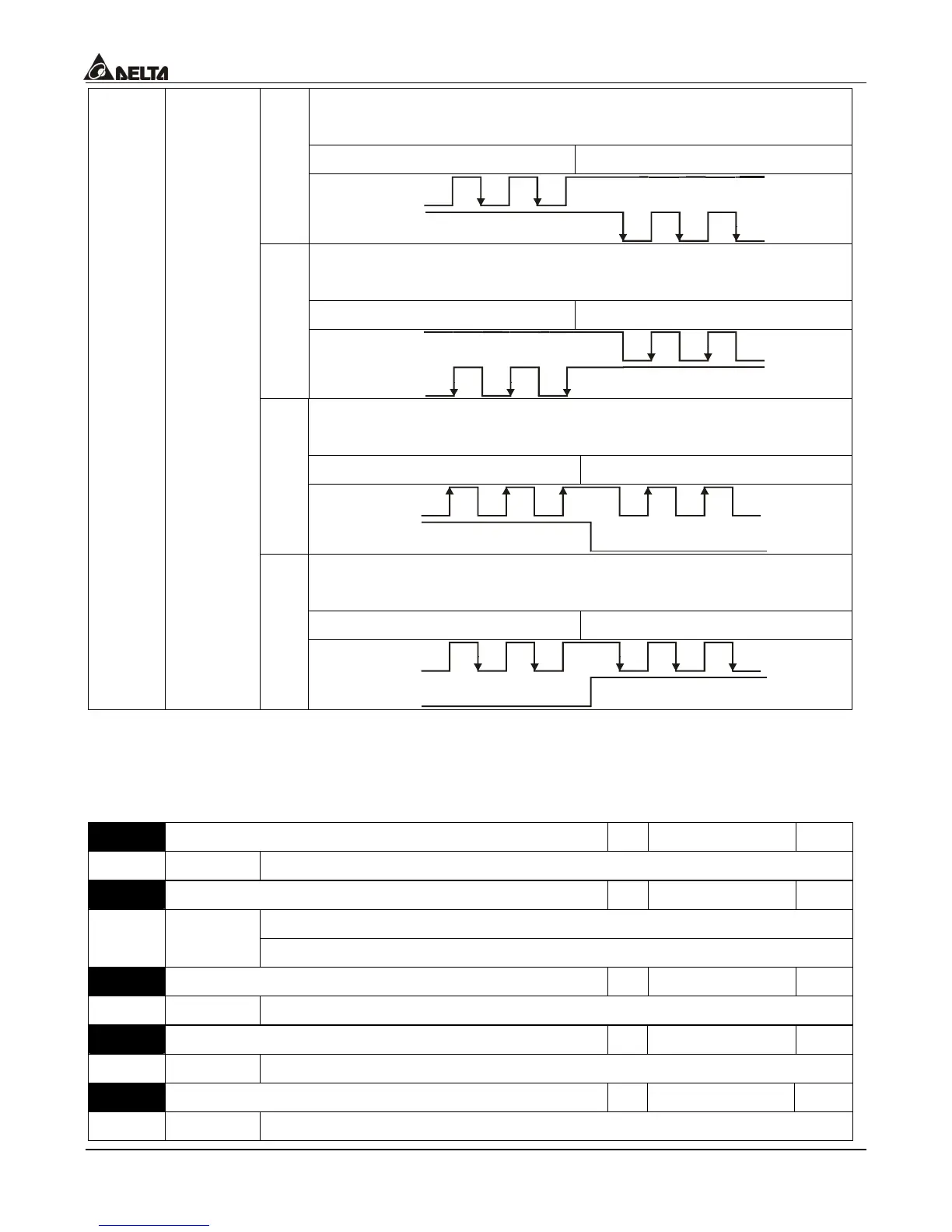
Phase A is a forward run pulse, then phase B is High.
Phase B is a reverse run pulse, then phase A is High.
FWD REV
2
A
B
Phase B is a forward run pulse, then phase A is High.
Phase A is a reverse run pulse, then phase B is High.
FWD REV
3
A
B
Phase A is a pulse input, phase B is a direction input,
(low = reverse , high = forward)
FWD REV
4
A
B
Phase A is a pulse input, phase B is direction input.
(low = forward, high = reverse)
FWD REV
5
A
B
This parameter is used to define the encoder input type on channel 2 of the PG04/05.
♦ Position Control Parameter
10-13 Proportional (P) Gain
a
Factory setting 50.0
Settings 0.0~500.0%
10-14 Integral (I) Time
a
Factory setting 0.050
Settings 0.000~100.000 Sec
0.000: no integral
10-15 Differential (D) Time
a
Factory setting 0.25
Settings 0.00~1.00 Sec
10-16 Orient Speed
a
Factory setting 5.00
Settings 0.00~400.00 Hz
10-17 Creep point
a
Factory setting 100
Settings 0~20000

 Loading...
Loading...

