DVC6000f Series
March 2006
5-80
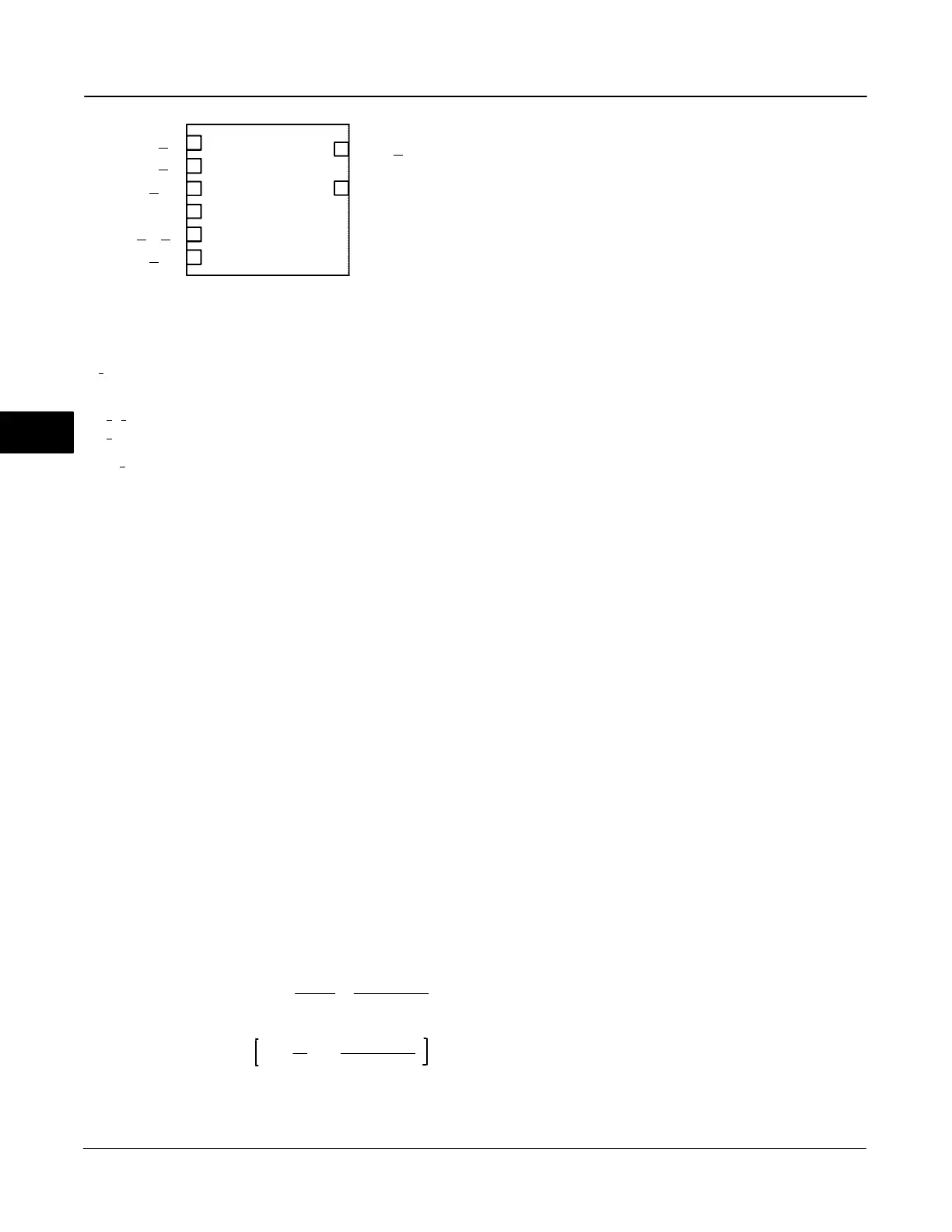
Figure 5-11. Proportional+Integral+Derivative (PID)
Function Block
B2720 / IL
BKCAL OUT
OUT
CAS
IN
PID
BKCAL IN
FF
VAL
IN
TRK IN D
TRK
VAL
BKCAL_IN
= THE ANALOG INPUT VALUE AND STATUS FROM ANOTHER
BLOCK’S BKCAL _OUT OUTPUT THAT IS USED FOR
BACKWARD OUTPUT TRACKING FOR BUMPLESS TRANSFER
AND TO PASS LIMIT STATUS.
CAS_IN
= THE REMOTE SETPOINT VALUE FROM ANOTHER FUNCTION
BLOCK.
FF_
VAL = THE FEEDFORWARD CONTROL INPUT VALUE AND STATUS.
IN
= THE CONNECTION FOR THE PROCESS VARIABLEFROM
ANOTHER FUNCTION BLOCK.
TRK_
IN_D = INITIATES THE EXTERNAL TRACKING FUNCTION.
TRK_
VAL = THE VALUE AFTER SCALING APPLIED TO OUT IN LOCAL
OVERRIDE MODE.
BKCAL_
OUT = THE VALUE AND STATUS REQUIRED BY THE BKCAL_IN INPUT
OF ANOTHER FUNCTION BLOCK TO PREVENT RESET WINDUP
AND TO PROVIDE BUMPLESS TRANSFER TO CLOSED LOOP
CONTROL.
OUT
= THE BLOCK OUTPUT AND STATUS.
PID Function Block Overview
The PID function block combines all of the necessary
logic to perform proportional/integral/derivative (PID)
control. The block supports mode control, signal
scaling and limiting, feedforward control, override
tracking, alarm limit detection, and signal status
propagation.
The block supports two forms of the PID equation:
Standard and Series. You can choose the appropriate
equation using the MATHFORM [70] parameter. The
Standard ISA PID equation is the default selection.
Standard Out + GAIN ex
ǒ
1 )
1
t
r
s ) 1
)
t
d
s
T t
d
s ) 1
Ǔ
) F
Series Out + GAIN ex
ǒ
1 )
1
t
r
s
Ǔ
)
ǒ
t
d
s ) 1
T t
d
s ) 1
Ǔ
)F
where
GAIN: proportional gain value
τ
r
: integral action time constant (RESET
parameter) in seconds
s: laplace operator
τ
d
: derivative action time constant (RATE
parameter)
α: fixed smoothing factor of 0.1 applied to
RATE
F: feedforward control contribution from the
feedforward input (FF_VAL)
E: error between setpoint and process variable
To further customize the block for use in your
application, you can configure filtering, feedforward
inputs, tracking inputs, setpoint and output limiting,
PID equation structures, and block output action.
Table 5-31 lists the PID block parameters and their
descriptions, units of measure, and index numbers,
and figure 5-12 illustrates the internal components of
the PID function block.
Modes
The PID function block supports the following modes:
Manual (Man)—The block output (OUT [9]) may
be set manually.
Automatic (Auto)—The SP [8] may be set
manually and the block algorithm calculates OUT [9].
Cascade (Cas)—The SP [8] is calculated in
another block and is provided to the PID block through
the CAS_IN [18] connection.
RemoteCascade (RCas)—The SP [8] is
provided by a host computer that writes to the
RCAS_IN [32] parameter.
RemoteOutput (ROut)—The OUT [9] is
provided by a host computer that writes to the
ROUT_IN [33] parameter.
Local Override (LO)—The track function is
active. OUT [9] is set by TRK_VAL [39]. The
BLOCK_ERR [6] parameter shows Local override.
Initialization Manual (IMan)—The output path
is not complete (for example, the cascade−to−slave
path might not be open). In IMan mode, OUT [9]
tracks BKCAL_IN [27].
Out of Service (OOS)—The block is not
processed. The OUT [9] status is set to Bad: Out of
5
 Loading...
Loading...







