FOUNDATION fieldbus Communication
March 2006
A-3
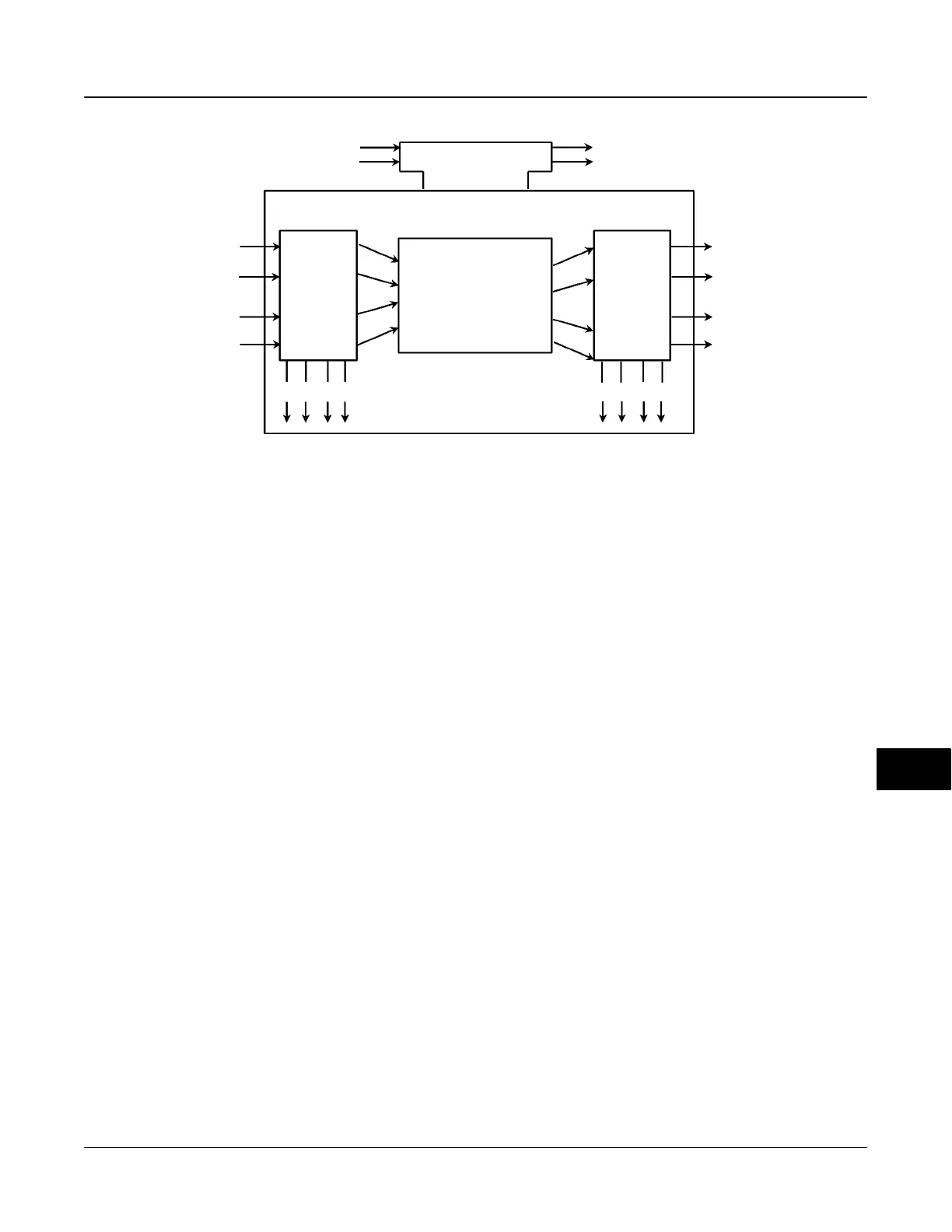
Figure A-1. Function Block Internal Structure
Input
Events
Output
Events
Processing
Algorithm
Output
Snap
Input
Snap
Input Parameter
Linkages
status status
Execution Control
Output Parameter
Linkages
B2711 / IL
Resource Blocks
The resource block contains hardware specific
characteristics associated with the device; it has no
input or output parameters. The algorithm within a
resource block monitors and controls the general
operation of the physical device hardware. The
execution of this algorithm is dependent on the
characteristics of the physical device, as defined by
the manufacturer. As a result of this activity, the
algorithm may cause the generation of events. There
is only one resource block defined for a device. For
example, placing the resource block in Out of Service
mode stops all function block execution, by setting
their modes to Out of Service as well. The actual
mode of the function blocks is changed to Out of
Service, but the function block target modes will not
change. Placing the resource block in the Out of
Service mode does not affect the mode of the
transducer block.
Transducer Blocks
Transducer blocks connect function blocks to local
input/output functions. They read sensor hardware and
write to effector (actuator) hardware. This permits the
transducer block to execute as frequently as
necessary to obtain good data from sensors and
ensure proper writes to the actuator without burdening
the function blocks that use the data. The transducer
block also isolates the function block from the specific
characteristics of the physical I/O.
Block Modes
All blocks have modes. The mode determines the
source of the set point, the destination of the output,
how the block executes, and the relationship between
setpoint and output. The block mode is determined by
the Block Mode parameter. It is a structured
parameter composed of the attributes actual, target,
permitted, and normal. The following defines each of
the attributes.
Target mode— The Target mode is the mode
requested by the user or host system. Only one mode
is allowed to be set and it must be a permitted mode
as defined by the permitted attribute of the mode
parameter.
Actual mode— This is the current mode of the
block. The actual mode may differ from the target
mode due to operating conditions of the block.
Permitted mode— The permitted mode defines
the modes allowed for the block. This is set by the
user or host system but is restricted by the instrument
to modes supported by the instrument for the
particular block. Any change request to the Target or
Normal attribute is checked against the permitted
attribute to ensure the requested mode is permitted.
When setting the Permitted mode, there is no check
against any of the other attributes (Normal or Target
modes). Therefore, the normal or target mode
attributes may have a value that is not permitted
because the permitted attribute was modified after the
Normal or Target mode was set. This will have no
effect on the instrument until the user attempts to
A
 Loading...
Loading...







