DVC6000f Series
March 2006
5-86
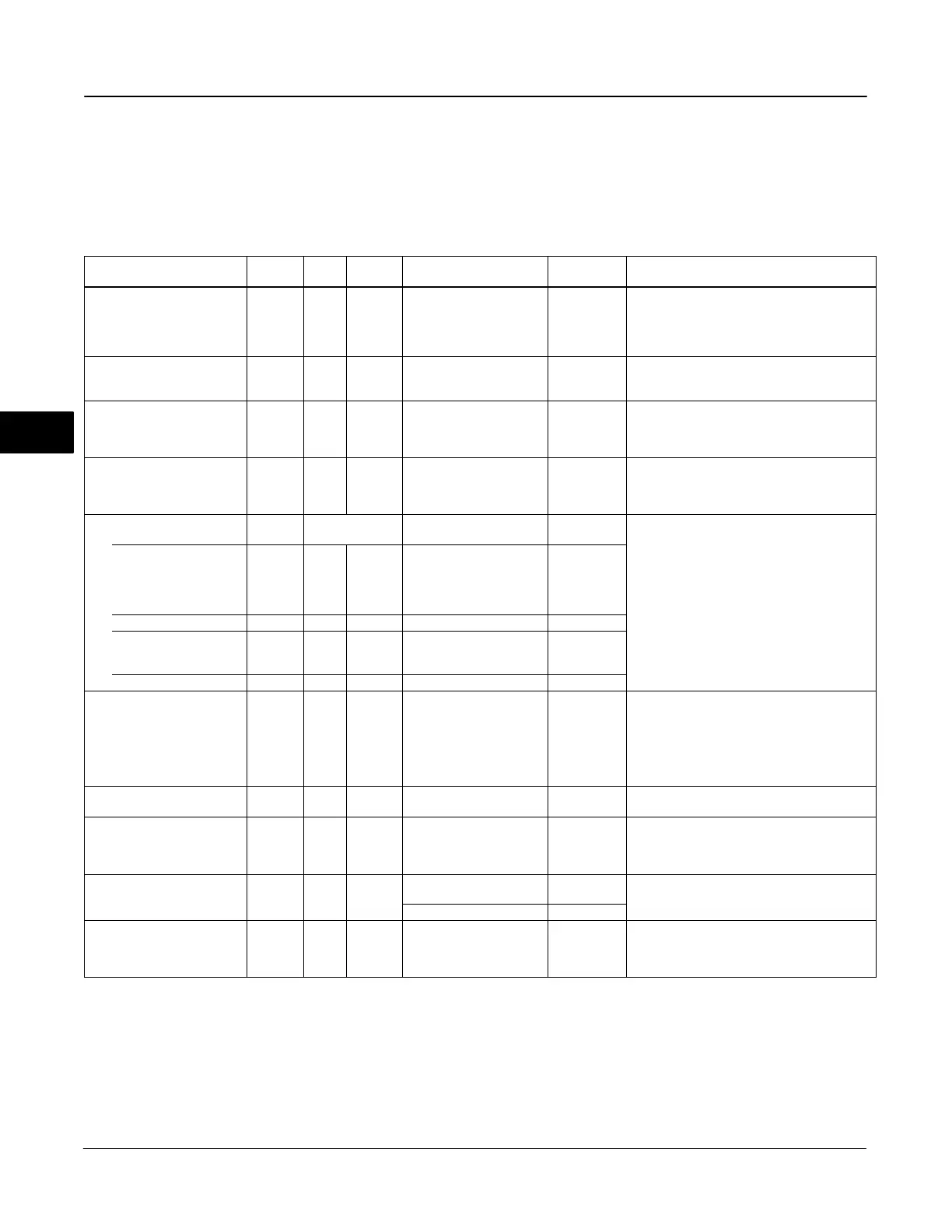
PID Block Parameter List
Read/Write Capability: RO − Read Only, RW − Read Write
Mode: The block mode(s) required to write to the parameter
Double indentation and shaded Index Number indicates sub-parameter
Table 5-31. PID Function Block System Parameters Definitions
Label
PARAMETER_NAME
Index
Number
RO /
RW
Block
Mode
Range Initial Value Description
Static Revision
ST_REV
1 RO N/A 0 to 65535 0
Data Type: Unsigned16
The revision level of the static data associated
with the function block. The revision value will be
incremented each time a static pa rameter value
in the block is changed.
Tag Description
TAG_DESC
2 RW ALL 7 bit ASCII Spaces
Data Type: Octet String
The user description of the intended application
of the block.
Strategy
STRATEGY
3 RW ALL 0 to 65535 0
Data Type: Unsigned16
The strategy field can be used to identify
grouping of blocks. This data is not checked or
processed by the block.
Alert Key
ALERT_KEY
4 RW ALL 0 to 255 0
Data Type: Unsigned8
The identification number of the plant unit. This
information may be used in the host for sorting
alarms, etc.
Block Mode
MODE_BLK
5
Data Type: DS-69
Valid Bits: 7: OOS, 6: IMAN, 5: LO, 4: MAN, 3:
AUTO, 2: CAS, 1: RCAS, 0: ROUT
The actual, target, permitted, and normal modes
of the block.
Target: The requested block mode
Actual: The current mode of the block
Permitted: Allowed modes for Target
Normal: Most common mode for Target
TARGET 5.1 RW ALL
OOS, MAN, AUTO
CAS, RCAS, ROUT
OOS until
block is
configured,
then last valid
target
ACTUAL 5.2 RO ALL OOS
PERMITTED 5.3 RW ALL
OOS+MAN+AUTO+
CAS+RCAS+ROUT
OOS MAN,
AUTO CAS,
RCAS ROUT
NORMAL 5.4 RW ALL AUTO
Block Error
BLOCK_ERR
6 RO N/A
Defined Bits
1: Block Configuration Error
4: Local Override
7: Input Failure/ Bad PV
status
14: Power-up
15: Out-of-Service
Dynamic
Data Type: Bit String
0 = inactive
1 = active
This parameter reflects the error status
associated with the hardware or software
components associated with a block. It is a bit
string so that multiple errors may be shown.
Process Value
PV
7 RO N/A Dynamic
Data Type: DS-65
The process variable used in block execution.
Setpoint
SP
8
OOS
MAN
AUTO
PV_SCALE +/− 10% Dynamic
Data Type: DS-65
The target block setpoint value. It is the result of
setpoint limiting and setpoint rate of change
limiting.
Output
OUT
9
MAN
OOS
Status
OUT_SCALE +/− 10%
Dynamic
DS-65
The block output value and status.
Value
Process Value Scale
PV_SCALE
10 OOS
EU at 100%
EU at 0%
Units index
Decimal
Point
100
0
%
2
Data Type: DS-68
The high and low scale values, engineering units
code, and number of digits to the right of the
decimal point associated with PV.
−Continued−
5
 Loading...
Loading...







