67XP6102 - Helicopter Manual
CCPM Swashplate Mixing (continued)
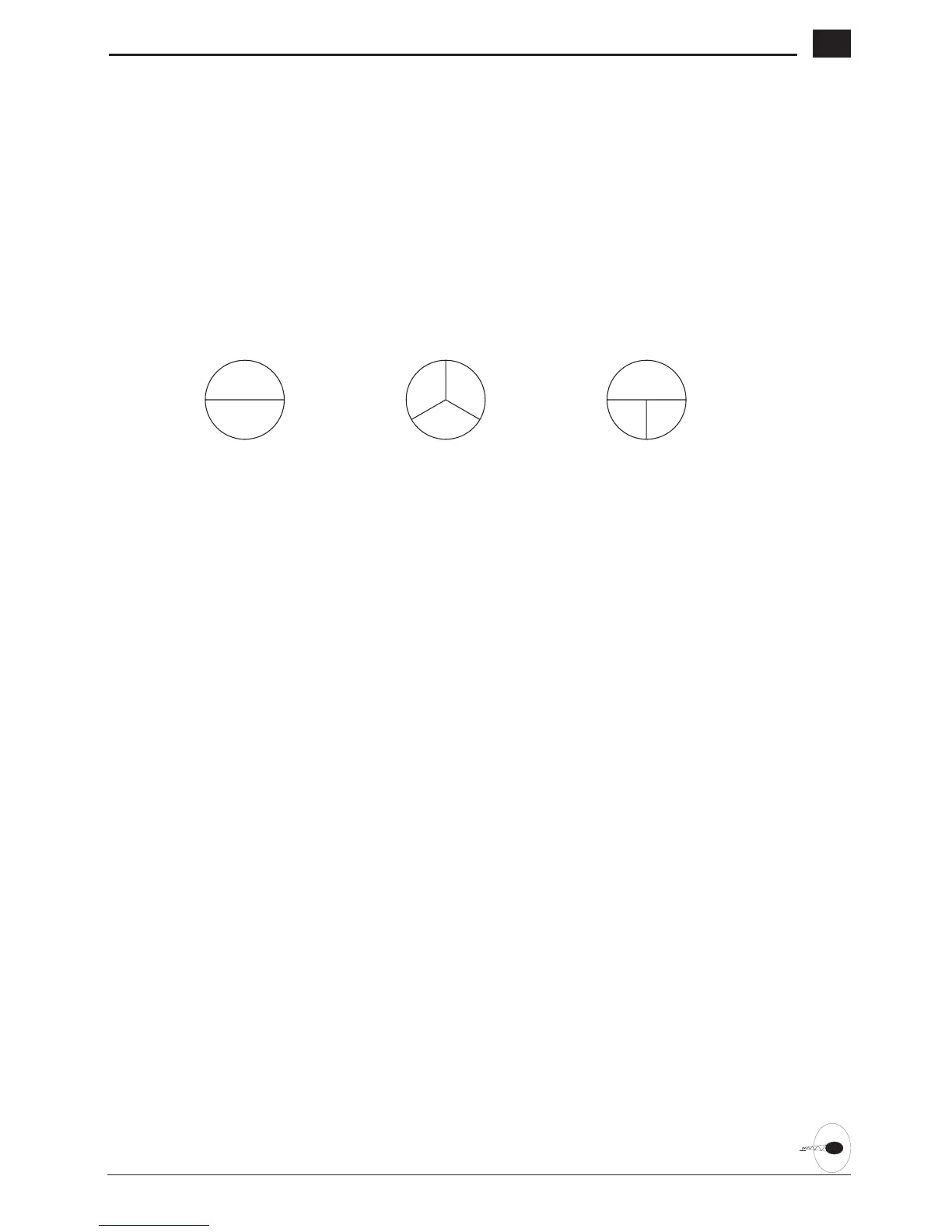
CCPM is a type of pitch mixing where the
two or three servos are connected directly
to the swashplate of the helicopter and
physically move both together and
independently for all changes in
pitch/cyclic. Please refer to the diagram
below.
1). One servo (Standard Mechanical
Mixing)
The most common form of Swashplate
Mixing. This type uses each of the three
servo to move the swashplate individually
for pitch, Aileron, and Elevator changes. If
one servo (NORM) is selected in the
System Mode (Factory Default), the
Swashplate Type Function will not appear
on the LCD screen in this section.
2). Two servo (180-degrees)
Two servos are used to move the
swashplate, and are spaced at 180degrees
apart. This is not a very common control
system configuration.
3). Three servo (120-degrees)
Three servos are used to move the
swashplate, and are spaced at 120degrees
apart. This is the most common form of
CCPM, and is found in JR and other
brands of Helicopters.
4). Three servo (90-degrees)
Three servos are used to move the
swashplate, and are spaced at 90degrees
apart. This is also not a very common
control system configuration.
CCPM Servo Connection/
Channel Numbers
2 servo (180°)
Ch2 = Aileron
Ch2 = Elevator
Ch6 = Pitch
3 servo (120°)
Ch2 = Aileron
Ch3 = Elevator
Ch6 = Pitch
3 servo (90°)
Ch2 = Aileron
Ch6 = Pitch

 Loading...
Loading...








