2 Unpacking to Installation
Confirming the operation
2-47
2.3.2 Setting the hand parameters
Set the parameters to set the hand I/O type and the hand condition according to the robot hand to be used. Refer
to the separate volume, "Instruction Manual/Detailed Explanations of Functions and Operations" for how to set
parameters.
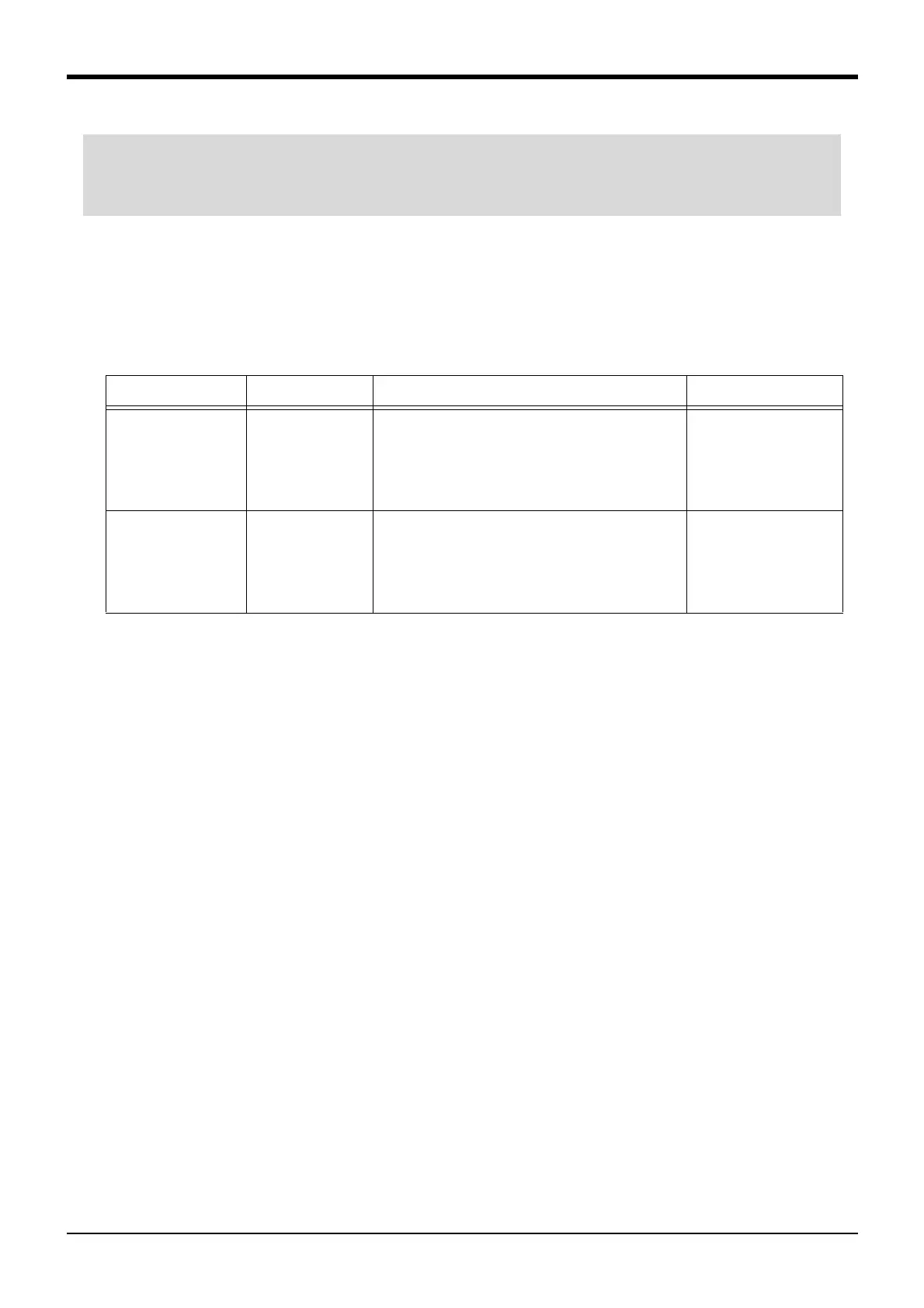
Table 2-5 : Hand parameter
Parameter Parameter name Details explanation Factory setting
Hand I/O type HIOTYPE Set either the sink type or the source type for the
solenoid valve and the logic of the hand input signal.
-1: Not set
0: Source type
1: Sink type
-1
Hand condition HNDDAT*
* is 0 to 8
Set the initial condition of the hand. (Specify with the tool
coordinate system.)
(Weight, size X, size Y, size Z, center of gravity X, center
of gravity Y, center of gravity Z)
Unit: Kg, mm
The setting varies
depending on the model.
◇◆◇ Tool length ◇◆◇
The default tool length is 0mm, and the control point is the center of the end axis.
After installing the hand, set the correct tool length in the parameters. Refer to the separate manual "Detailed
Explanation of Functions and Operations" for details.
 Loading...
Loading...


