FX Series Programmable Controlers Applied Instructions 5
5-164
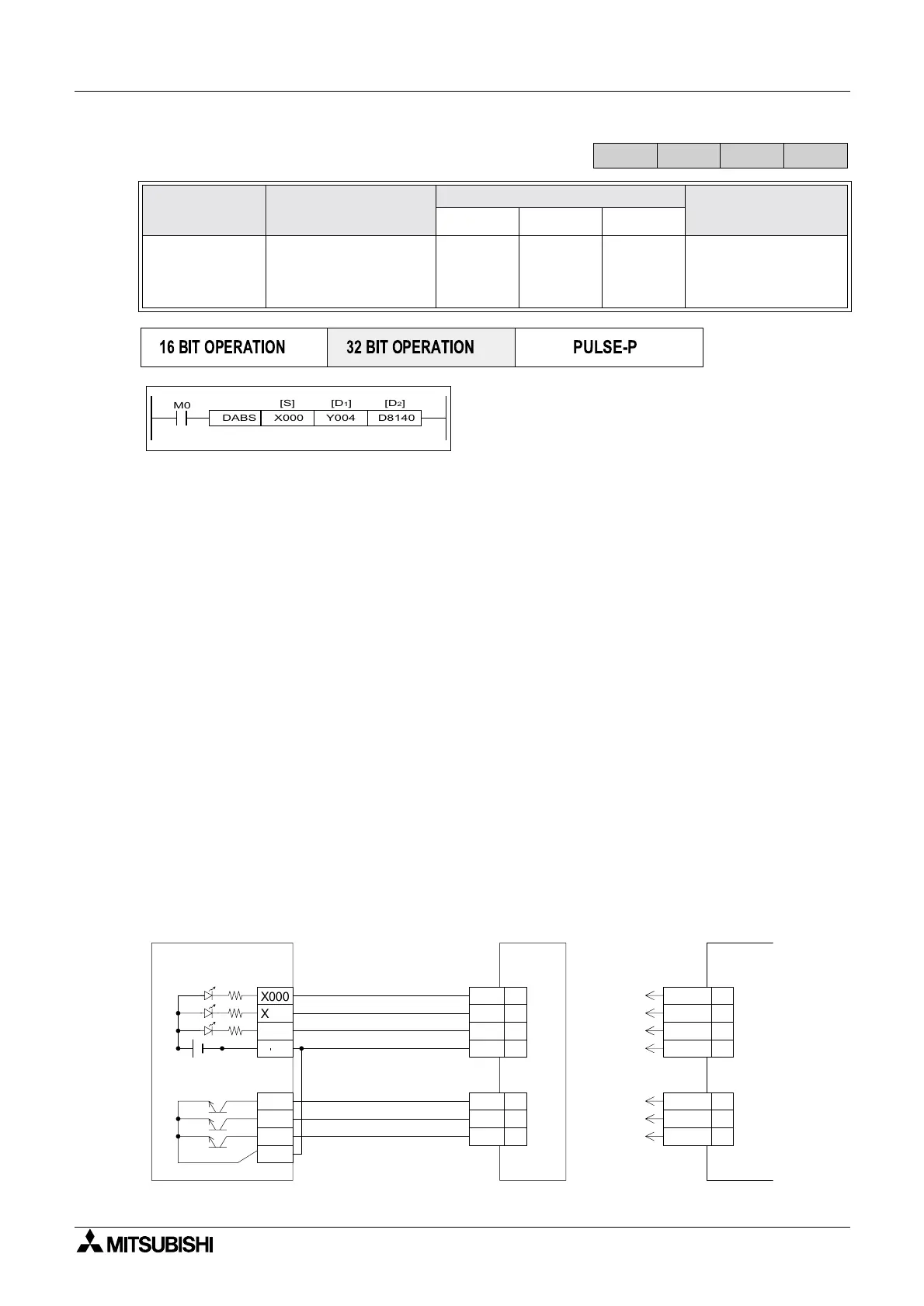
5.13.6 ABS (FNC 155)
Operation:
This instruction reads the absolute position data
when a Mitsubishi servo motor, MR-H or MR-J2,
equipped with absolute positioning function is
connected. [S] is the first of three inputs used for
communication flags (see drawing below), [D
1
]is
the first of three communication outputs and [D
2
] is the data destination register.
Points to note:
a)This instruction is 32-Bit. Be sure to input as “DABS”
b)Read starts when the instruction drive contact turns ON. When the read is complete, the
execution complete flag M8029 is energized.
If the instruction drive contact is turned OFF during read, read is aborted.
c)When designing a system, set the servo amplifier to be ON earlier than the power of the
PLC, or so that they are both powered ON at the same time.
d)The device [D
2
] to which the absolute value is read, can be set within a word device range.
However, the absolute value should be transferred at some point to the correct registers
(D8141 & D8140)
e)The DABS instruction drive contact uses an input which is always ON, even after the
absolute value is read.
If the instruction drive contact turns OFF after the read is complete, the servo ON (SON)
signal will turn OFF and the operation disabled.
f)Even if the servo motor is equipped with an absolute position detection function, it is good
practice to execute a zero return operation during initial system set up.
Mnemonic Function
Operands
Program steps
S
D
1
D
2
ABS
FNC 155
Absolute current
value read
Reads the absolute
position from a servo
motor
X,Y,M,S Y,M,S T,C,D,V,Z DABS
13 steps
FX
1S
FX1N FX2N
FX2NC
PULSE-P
16 BIT OPERATION
32 BIT OPERATION
DABS X000 Y004 D8140
[S] [D
2][D1]
M0
X000
X001
X002
COM
Y004
Y005
Y006
COM4
+
PF
24
23
ZSP
25
TLC
16
SG
12
SON
D13
44
CN1
24V
D14
45
D01
4
19
ZSP
6
TLC
10
SG
12
SON
ABSM
44
CN1
ABSR
45
Y004
Y005
Y006
X001
X002
COM
X000
Servo On
ABS Data Forwarding Mode
ABS Data Request
ABS (bit 0)
ABS (bit 1)
Send Data Ready Flag
FX1S-30MT MR-H-A MR-J2-A
 Loading...
Loading...



