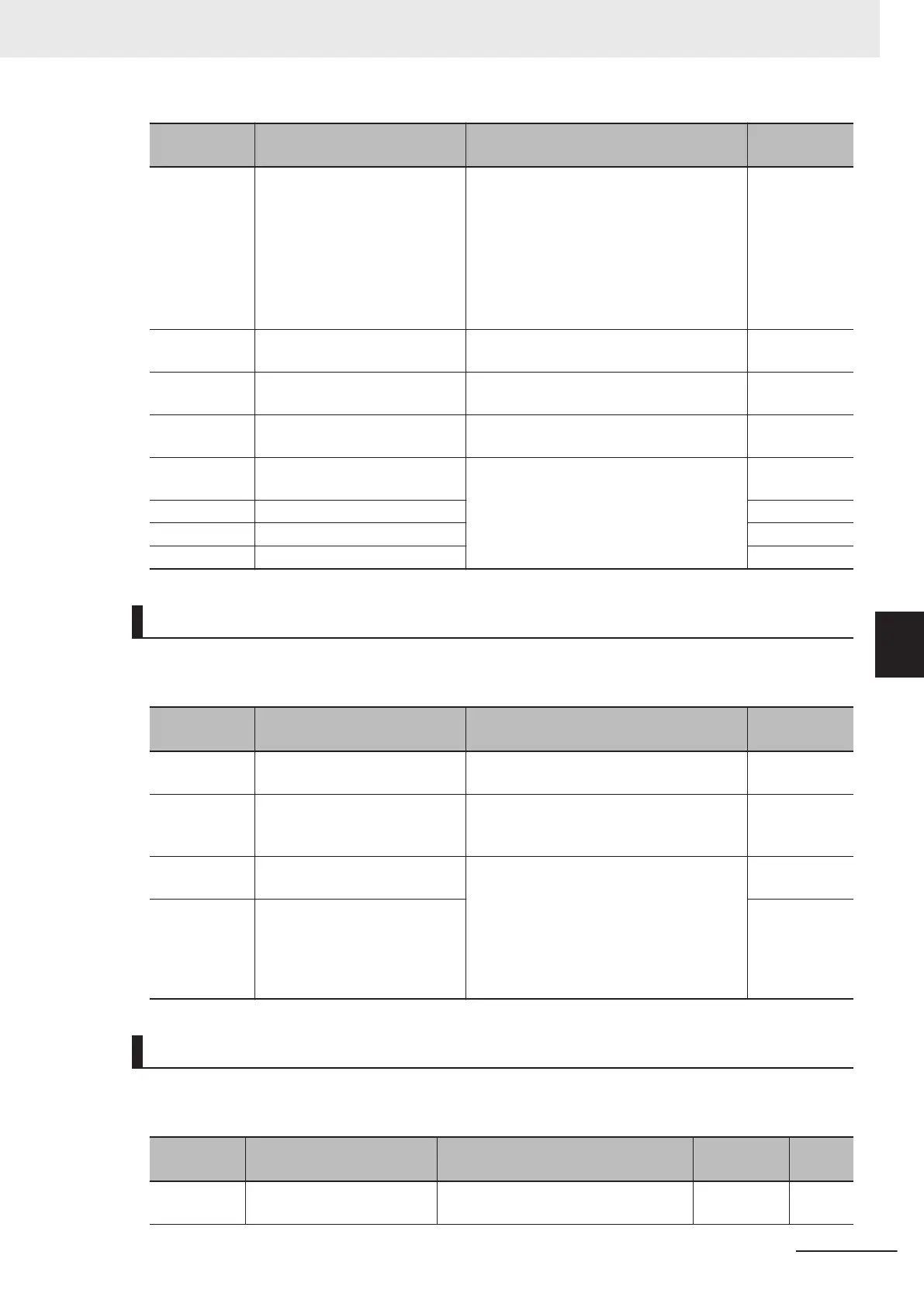
Parameter
No.
Function name Set data Default data
P30 1st PM Motor Starting Method
0: Pull-in by current
1: For IPM type 1(Interior permanent mag-
net synchronous motor)
2: For SPM type (Surface permanent mag-
net synchronous motor)
3: Pull-in by current for IPM type
4: For IPM type 2(Interior permanent mag-
net synchronous motor)
1
P63
1st PM Motor Induced Voltage
Ke
When unknown, perform rotation tuning.
Dependent on
capacity
P64 1st PM Motor Iron Loss When unknown, set 0%.
Dependent on
capacity
P90
1st PM Motor Overcurrent Pro-
tection Level
When unknown, set 2x the rated current.
Dependent on
capacity
F03
1st Maximum Output Frequen-
cy
Design specification value
60.0 Hz
F15 1st Frequency Upper Limit 70.0 Hz
F07 1st Acceleration Time 1 6.0 s
F08 1st Deceleration Time 1 6.0 s
When Control with Speed Sensor Is Selected as Control Method
When a control with speed sensor is selected as the control method, the following parameters match-
ed to the encoder specifications are required.
Parameter
No.
Function name Set data Default data
d14
Input Terminal [PIA][PIB] Pulse
Input Format Selection
2: Quadrature A/B signal (B phase lead)
3: Quadrature A/B signal (A phase lead)
2
d15
Input Terminal [PIA][PIB] En-
coder Pulse Resolution
Number of pulses of motor encoder to be
controlled
0400 (hexadecimal display) / 1024 P/R
0400 (hexa-
decimal dis-
play)
d16
Input Terminal [PIA][PIB] Pulse
Scaling Factor Denominator
Set the speed reduction ratio of the motor
and encoder
.
When the encoder is directly coupled to the
motor
, this does not need to be set. (De-
fault value = 1)
Motor speed = Encoder speed × (d17)/
(d16)
1
d17
Input T
erminal [PIA][PIB] Pulse
Scaling Factor Numerator
1
Parameters That Do Not Require Setting
The following table shows parameters whose values are determined by other parameters or parame-
ters that do not need to be changed from their factory default values.
Parameter
No.
Function name Data Default data Unit
P13/A27
1st Iron Loss Factor 1/2nd
Iron Loss Factor 1
0.00 to 20.00%
Dependent
on capacity
%
6 Vector Control and Applied Functions
6-9
M1 Series Standard Type User's Manual (I669)
6-1 Details of Motor Control Methods
6
6-1-3 Motor Parameter Settings
 Loading...
Loading...









