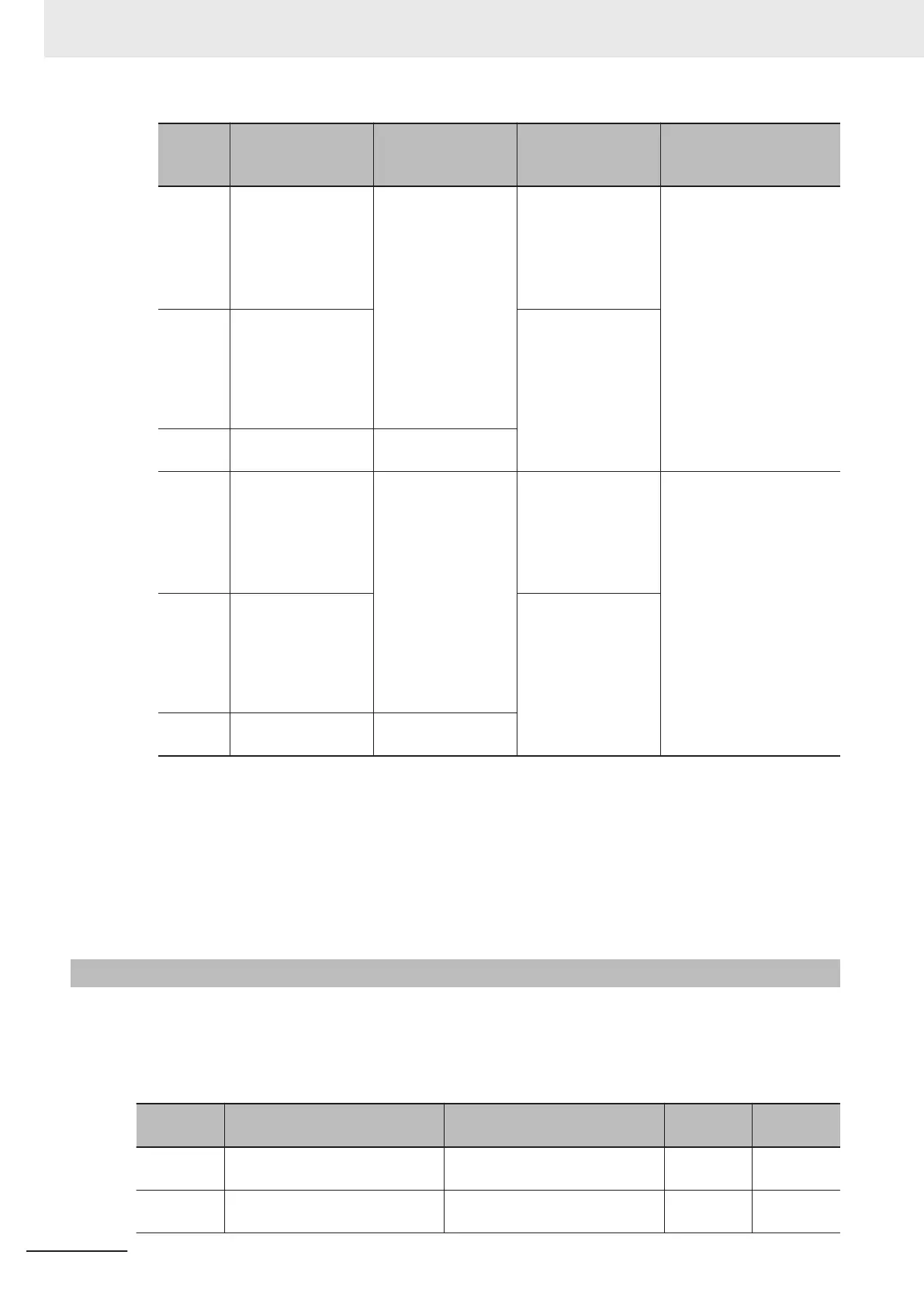
d23 data Function Detection condition
Post-detection
processing
Error detection width
when speed command >
F04
0 Continue to run 1
When the speed
command (after soft-
ware start process-
ing) cannot be fol-
lowed due to a
heavy overload, for
example, and the
detection speed
drops compared with
the speed com-
mand, a PG error is
not judged.
The excessive
speed deviation
“DSE” signal is out-
put and the inverter
continues to oper-
ate.
Even at 1st Base Frequen-
cy (F04) or higher, con-
stant at “detection width =
d21 × maximum frequen-
cy.”1 Stop with alarm 1
Inverter free-run at
ErE alarm
2 Stop with alarm 2
There are no excep-
tion conditions.
3 Continue to run 2
When the speed
command (after soft-
ware start process-
ing) cannot be fol-
lowed due to a
heavy overload, for
example, and the
detection speed
drops compared with
the speed com-
mand, a PG error is
not judged.
The excessive
speed deviation
“DSE” signal is out-
put and the inverter
continues to oper-
ate.
At 1st Base Frequency
(F04) or lower
, constant at
“detection width = d21 ×
maximum frequency.”
At 1st Base Frequency
(F04) or higher
, “detection
width = d21 × speed com-
mand × maximum fre-
quency / base frequency.”
4 Stop with alarm 3
Inverter free-run at
ErE alarm
5 Stop with alarm 4
There are no excep-
tion conditions.
When Continue to run (0 or 3) is set in Speed Deviation Error Processing Selection (d23), inverter
output is not shut off (tripped). For this reason, allocate “76: DSE (excessive speed deviation)” to
Output Terminal [DO1] Function Selection (E20), Output T
erminal [DO2] Function Selection (E21)
or Output Terminal [ROA, ROB] Function Selection (E27), and configure a sequence that, for ex-
ample, stops control.
To judge that the speed deviation is within the setting range, allocate “71: DSAG (speed agree-
ment).”
6-2-3
Adjustments for V/f Control with Speed Feedback
You can adjust the V/f control with speed feedback function with the gain settings shown below.
However
, the function cannot be adjusted when using a motor that causes an extremely large slip
(10% of the rated rotation speed or higher) or in applications where such a large load that causes the
motor to stall (or step out) is applied. If so, set the type and capacity of the motor again.
Parameter
No.
Function name Data
Default da-
ta
Unit
d03
Speed Control 1 P Proportional
Gain
0.1 to 200.0 10.0 time
d04 Speed Control 1 I Integral Time
0.001 to 9.999
999: Cancel integral term
0.100 s
6 Vector Control and Applied Functions
6-14
M1 Series Standard Type User's Manual (I669)
 Loading...
Loading...









