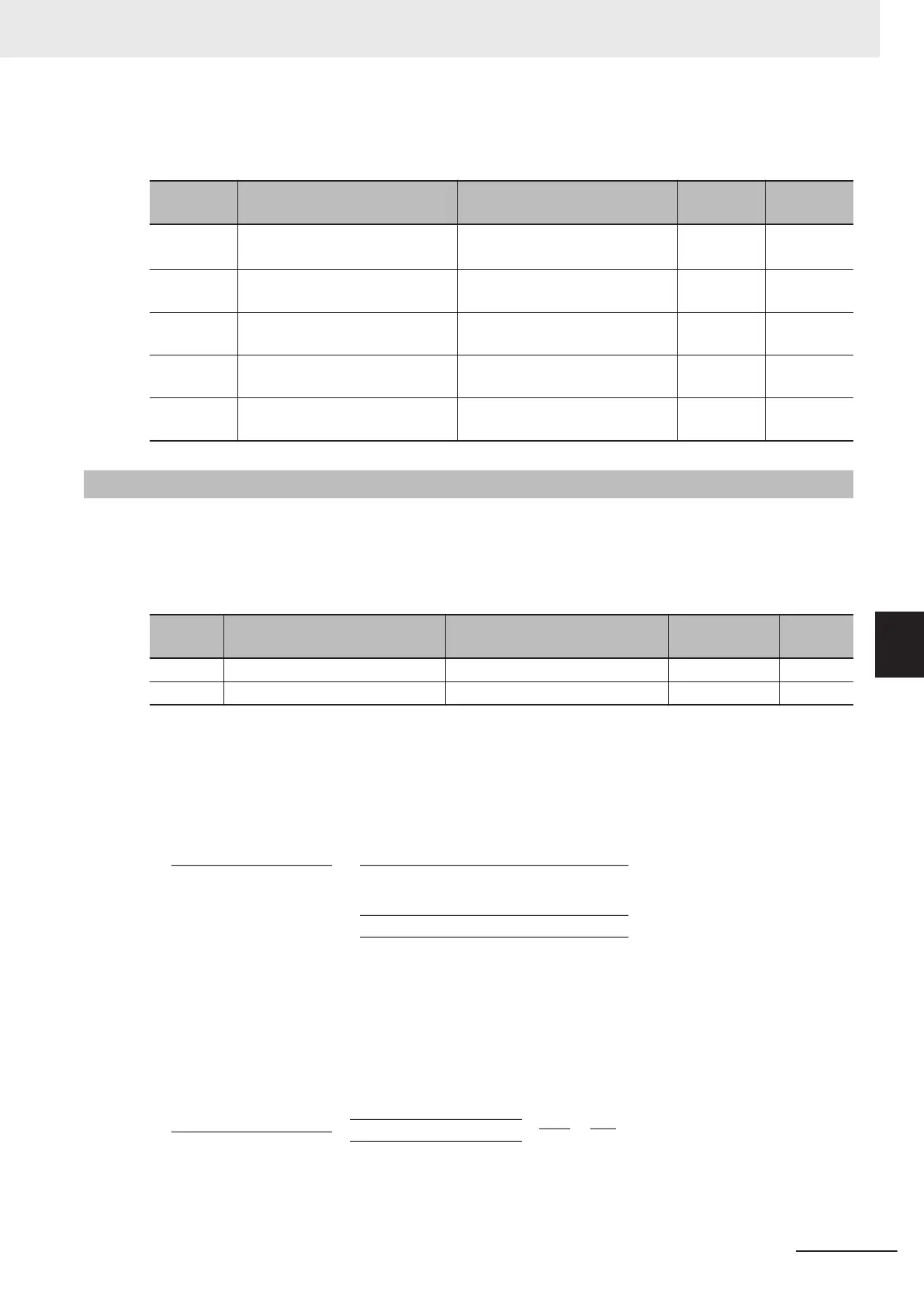
when system rigidity is weak and gain is increased, set a large value in Position Control Feed Forward
Gain (d201).
Parameter
No.
Function name Data
Default da-
ta
Unit
d201
Position Control Feed Forward
Gain
0.00: Cancel
0.00 -
0.01 to 1.50
d202
Position Control Feed Forward
Filter
0.000 to 5.000 0.500 s
d203
Position Loop Gain 1 (low speed
side)
0.1 to 300.0 1.0 -
d204
Position Loop Gain 2 (high speed
side)
0.1 to 300.0 1.0 -
d205
Position Loop Gain Switch Fre-
quency
0.0 to 590.0 0.0 Hz
6-7-3
Electronic Gear
With position control, the moving amount is basically managed by the number of pulses of the PG.
However, it is more convenient to manage moving amounts referenced to physical numeric values
(user values). The conversion ratio of user values to number of PG pulses can be set as an electronic
gear.
Parame-
ter No.
Function name Data Default data Unit
d206 Electronic Gear Denominator 1 to 65535 1 -
d207 Electronic Gear Numerator 1 to 65535 1 -
How to calculate the electronic gear
Electronic gear numerator/electronic gear denominator ratio can be calculated based on the mov-
ing amount per user values unit (position resolution) [mm/user preference], moving amount per sin-
gle rotation of the motor [mm/rev] and number of PG pulses per single rotation of the motor [pulse/
rev].
Electronic gear numerator
Moving amount per 1 PG pul
se [mm/pulse]
Moving amount per user valu
e [mm/user value]
Electronic gear denominator
=
Moving amount per motor rotation [mm/rev]
Moving amount per user valu
e [mm/user value]
=
Number of pulses per motor r
otation [pulse/rev]
Set the electronic gear reduced so that each of the electronic gear numerator/electronic gear de-
nominator reduced become integers of 65535 or less.
Ex-
am-
ple)
When the moving amount per user values unit is 0.1 [mm/user preference], machine speed at motor
speed of 1,800 [r/min] is 150 [m/min] and the number of PG pulses is 1,000 [pulse/rev]
Electronic gear numerator
Electronic gear denominator
=
180
150
150 × 1000 / 1800 [mm/rev]
0.1 [mm/user value]
1000[pulse/rev]
=
12
10
=
6 Vector Control and Applied Functions
6-39
M1 Series Standard Type User's Manual (I669)
6-7 Position Control
6
6-7-3 Electronic Gear
 Loading...
Loading...









