6-7-8
Basic Return-to-origin Operation
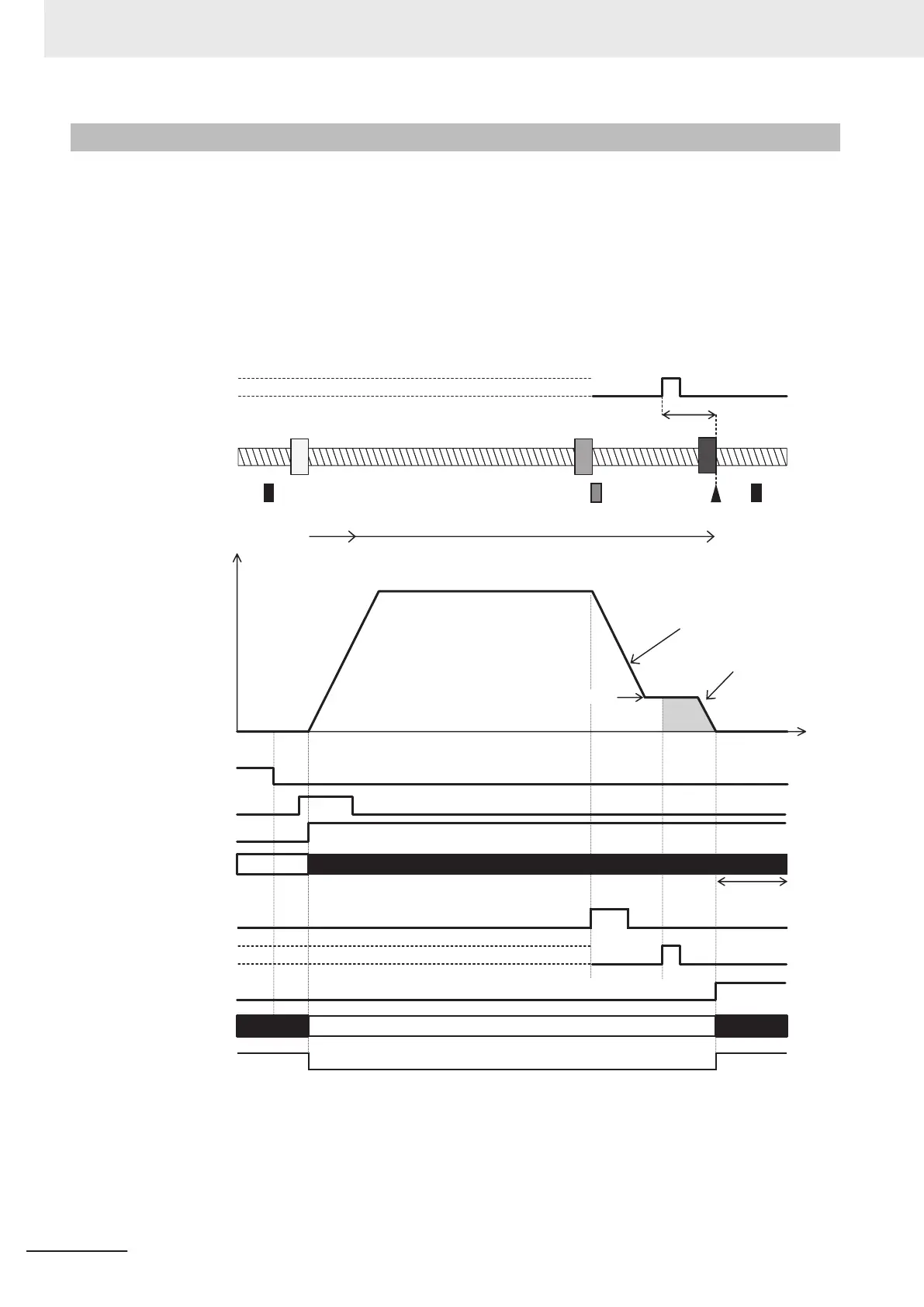
The return-to-origin operation is started when the RUN command is input with multifunction input ter-
minal “SPD” set to OFF and terminal “ORG” set to ON. Specify the operation direction in Homing Op-
eration Selection (d209). The return-to-origin operation is as follows. Acceleration is performed to the
frequency set in Homing Frequency/Orientation Frequency (d213), and, after the moving body has
turned origin search limit signal “ORL” ON, movement is performed from the initial Z phase signal (ref-
erence signal for homing of
fset) by the amounts set in the homing offsets (Homing Of
fset (MSB)
(d242) and Homing Offset (LSB) (d243)), and movement is stopped. The positioning completed signal
“POK” also is output. When overtravel turns ON before the origin limit switch, reverse rotation opera-
tion is performed to search for the origin limit switch.
OFF
OFF
OFF
OFF
ON
OFF
ON
OFF OFF
ON
OFF OFFON
OFF ON
ON
OFF ONON
OFF
ON
ON
OFFOFF
ON ON
Phase Z of PG
Frequency
[SPD]
[ORG]
Servo lock status
Time
[FW]
Inverter
output status
[ORL]
[POK]
[P-SEL]
Brake status
-OT
Startup direction of
return-to-origin operation +
Startup direction of return-to-origin operation +
Homing Frequency/Orientation Frequency [d213]
Deceleration Time
[F08,E11, E13, E15]
Acceleration Time
[F07, E10,
E12, E14]
Deceleration Time for
Homing/Orientation [d215]
Homing Offset
[d242, d243]
Origin LS
Homing offset
Origin +OT
Creep Frequency [d214]
Encoder
Phase Z
Homing Operation Selection (d209)
This parameter defines the startup direction of return-to-origin operation, moving direction of return-
to-origin operation, operation at detection of an overtravel, and limit switch detection timing.
6 Vector Control and Applied Functions
6-44
M1 Series Standard Type User's Manual (I669)
 Loading...
Loading...









