142
"C" Group: Intelligent Terminal Functions Section 3-7
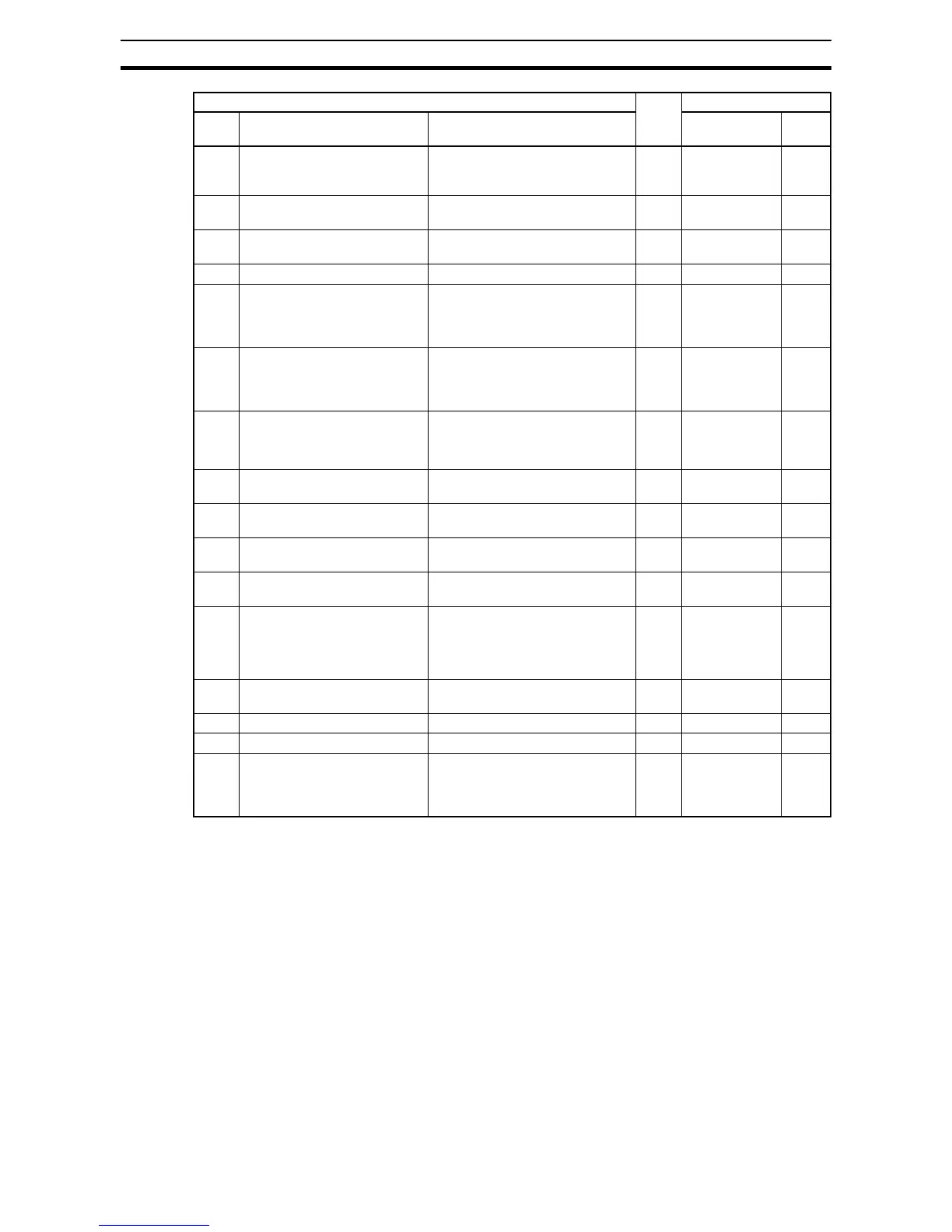
C044 PID deviation level Sets the allowable PID loop error
magnitude (absolute value), SP-
PV, range is 0.0 to 100%
8 3.0 %
C045 Frequency arrival setting 2 for
acceleration
Set range is 0.0 to 400.0 Hz
*1
8 0.00 Hz
C046 Frequency arrival setting 2 for
deceleration
Set range is 0.0 to 400.0 Hz
*1
8 0.00 Hz
C047 Pls. input scale [EO] Sets the scale for the pulse input 8 1.00
C052 PID FBV output high limit When the PV exceeds this value,
the PID loop turns OFF the PID
second stage output, range is 0.0
to 100%
8 100.0 %
C053 PID FBV output low limit When the PV goes below this
value, the PID loop turns ON the
PID second stage output, range is
0.0 to 100%
8 0.0 %
C054 Over-torque/under-torque
selection
Two option codes:
00... Over-torque
01... Under-torque
8 00 –
C055 Over/under-torque level
(Forward powering mode)
Set range is 0 to 200% 8 100. %
C056 Over/under-torque level
(Reverse regen. mode)
Set range is 0 to 200% 8 100. %
C057 Over/under-torque level
(Reverse powering mode)
Set range is 0 to 200% 8 100. %
C058 Over/under-torque level
(Forward regen. mode)
Set range is 0 to 200% 8 100. %
C059 Signal output mode of Over/
under-torque
Two option codes:
00... During accel., decel. and
constant speed
01... During constant speed only
8 01 –
C061 Electronic thermal warning
level
Set range is 0 to 100% Setting 0
means disabled.
8 90 %
C063 Zero speed detection level Set range is 0.0 to 100.0Hz 8 0.00 Hz
C064 Heat sink overheat warning Set range is 0 to 110 C 8 100. °C
C111 Overload warning level 2 Sets the overload warning signal
level between 0% and 200% (from
0 to two times the rated current of
the inverter)
9 Rated current A
*1
Up to 1000Hz for High frequency mode (d060 set to "2")
"C" Function Run
Mode
Edit
Defaults
Func.
Code
Name Description EU Units
 Loading...
Loading...












