89
"A" Group: Standard Functions Section 3-5
!Caution Be careful not to turn PID Clear ON and reset the integrator sum when the
inverter is in Run Mode (output to motor is ON). Otherwise, this could cause
the motor to decelerate rapidly, resulting in a trip.
3-5-8 PID Loop Configuration
The inverter's PID loop algorithm is configurable for various applications.
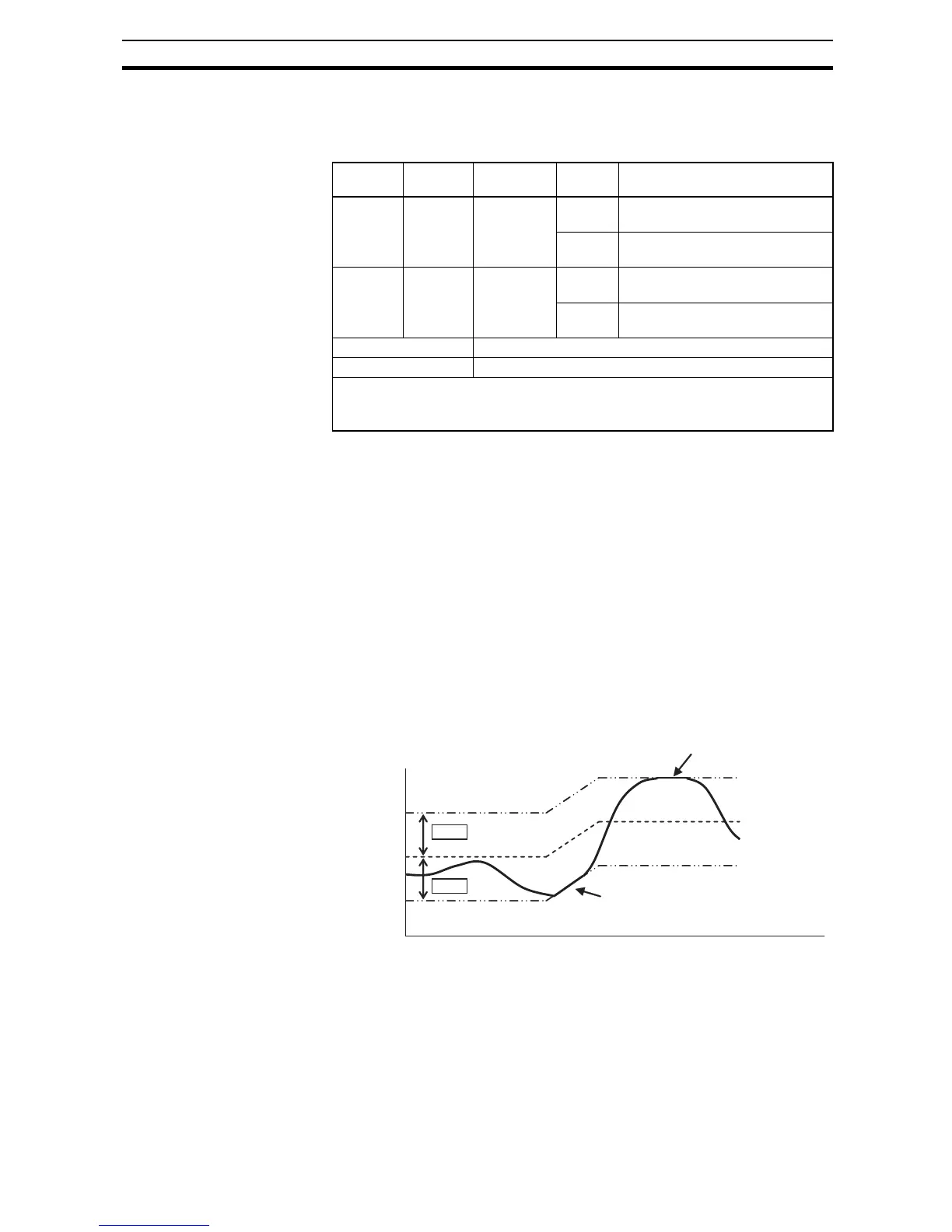
PID Output Limit - The PID loop controller has a built-in output limit function.
This function monitors the difference between the PID setpoint and the loop
output (inverter output frequency), measured as a percentage of the full scale
range of each. The limit is specified by parameter
A078.
• When the difference |(Setpoint - loop output)| is smaller than or equal to
the
A078 limit value, the loop controller operates in its normal linear range.
• When the difference |(Setpoint - loop output)| is larger than the
A078 limit
value, the loop controller changes the output frequency as needed so that
the difference does not exceed the limit.
The diagram below shows PID setpoint changes and the related output fre-
quency behavior when a limit value in
A078 exists.
Deviation (error) Inversion - In typical heating loops or ventilation loops, an
increase in energy into the process results in an increasing PV. In this case,
the Loop Error = (SP - PV). For cooling loops, an increase in energy into the
Option
Code
Terminal
Symbol
Function
Name
State Description
23 PID PID Disable ON Disables PID loop execution
OFF Allows PID loop execution
24 PIDC PID Clear ON Force the value of the integrator to
zero
OFF No change in PID loop execution
Valid for inputs: C001~C007
Required settings: A071
Notes:
• The use of [PID] and [PIDC] terminals are optional. Use A071=01 if you want PID
loop control enabled all the time.
t
Output limit
PID Setpoint
Output limit
A078
A078
%
Output freq.
Limit imposed
on output
Limit imposed
on output
 Loading...
Loading...












