87
"A" Group: Standard Functions Section 3-5
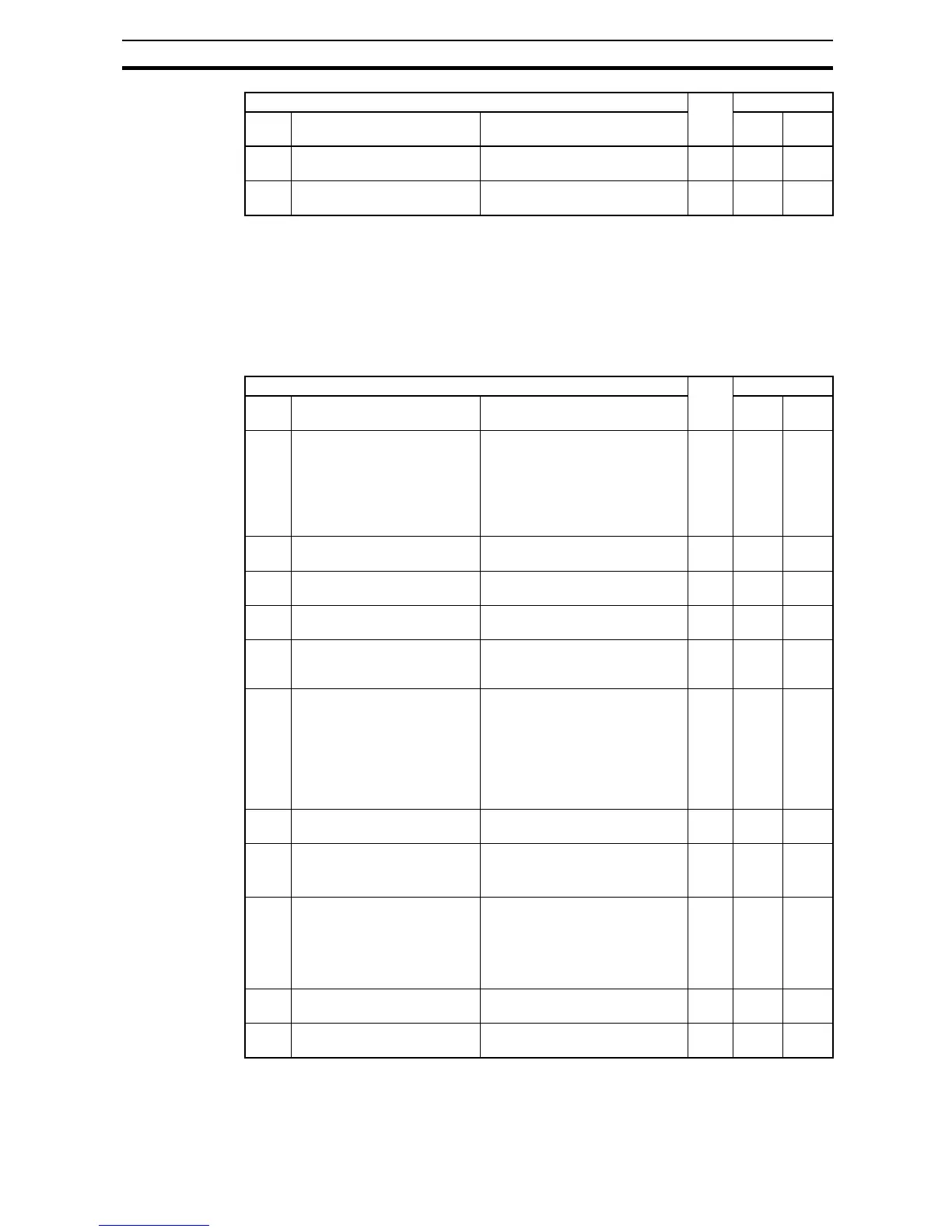
3-5-7 PID Control
When enabled, the built-in PID loop calculates an ideal inverter output value
to cause a loop feedback process variable (PV) to move closer in value to the
set point (SP). The frequency command serves as the SP. The PID loop algo-
rithm will read the analog input for the process variable (you specify the cur-
rent or voltage input) and calculate the output.
a154 Deceleration hold frequency Sets the frequency to hold decel-
eration, range is 0.0 to 400.0Hz
*2
8 0.0 Hz
a155 Deceleration hold time Sets the duration of deceleration
hold, range is 0.0 to 60.0 seconds
8 0.0 sec.
*1
Up to 1000Hz for High frequency mode (d060 set to "2")
*2
Up to 1000Hz for High frequency mode (d060 set to "2")
"A" Function Run
Mode
Edit
Defaults
Func.
Code
Name Description EU Units
"A" Function Run
Mode
Edit
Defaults
Func.
Code
Name Description EU Units
A071 PID enable Enables PID function, three option
codes:
00... PID Disable
01... PID Enable
02... PID Enable with reverse out-
put
8 00 –
A072 PID proportional gain Proportional gain has a range of
0.00 to 25.00
9 1.0 –
A073 PID integral time constant Integral time constant has a range
of 0.0 to 3600 seconds
9 1.0 sec
A074 PID derivative time constant Derivative time constant has a
range of 0.0 to 100 seconds
9 0.00 sec
A075 PV scale conversion Process Variable (PV), scale fac-
tor (multiplier), range of 0.01 to
99.99
8 1.00 –
A076 PV source Selects source of Process Vari-
able (PV), option codes: 00 [OI]
terminal (current in)
01... [O] terminal (voltage in)
02 ...ModBus network
03... Pulse train input 10 Calculate
function output
8 00 –
A077 Reverse PID action Two option codes: 00 PID input =
SP-PV 01 PID input = -(SP-PV)
8 00 –
A078 PID output limit Sets the limit of PID output as per-
cent of full scale,
range is 0.0 to 100.0%
8 0.0 –
a079 PID feed forward selection Selects source of feed forward
gain, option codes:
00... Disabled
01... [O] terminal (voltage in)
02... [OI] terminal (current in)
8 00 –
a156 PID sleep function action
threshold
Sets the threshold for the action,
set range 0.0~400.0 Hz
*1
8 0.00 Hz
a157 PID sleep function action delay
time
Sets the delay time for the action,
set range 0.0~25.5 sec
8 0.0 sec
*1
Up to 1000Hz for High frequency mode (d060 set to "2")
 Loading...
Loading...












