10.1Sonarapplicationoverview
TheSonarapplicationprovidesadetailedviewofshandthe
bottomunderyourvessel,enablingyoutoaccuratelydistinguish
betweendifferentsizesofsh,bottomstructure,andunderwater
obstacles.SonarusesCHIRPprocessingwithacentered200
KHzpingfrequency,whichprovideslessdetailbutgreaterdepth
rangethanDownVision.
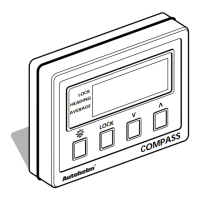
Thestandardimageisahistorical,scrollingbottomgraph.
1
Depthreading—Currentbottomdepth.
2
Scrollingpaused—ScrollingpauseswhentheJoystickisusedto
movethecursoraroundthescreen).
3Depthlines—Horizontaldashedlinesdrawnatregularintervalsto
indicatethedepthfromthesurface.
4
Cursor—Displayedincursormode.
5
Bottomline—Displaysathicklinetoidentifythebottom.
6Depthmarkers—Thesenumbersindicatedepth.
7
Speed—CurrentvesselSpeedOverGround(SOG).
8
Watertemperature—Currentwatertemperature.
9DepthTargetID—Depthsaredisplayedagainstrecognized
targets.ThesensitivityoftheseIDsisdirectlylinkedtotheFish
Alarmsensitivity;thegreatertheshalarmsensitivity,thegreater
thenumberoflabelledreturns.
Thevariousfunctionsandfeaturesofthesonarapplication
include:
•Displaymodes(Zoom,A-Scope).
•Adjustablerangeandzoom.
•Settingstoadjustandsimplifythesonarimage.
•Pausingandadjustingthespeedofthescrollingimage.
•Usingwaypointstomarkaposition.
•Determiningdepthsoftargets.
TheSonarapplicationusesdifferentcolorstodifferentiate
betweentargetstrengths.Colorsusedaredependantuponthe
colorpaletteinuse(forexampletheclassicbluecolorpalette
usesbluetoidentifytheweakestandredforthestrongest).
Thesonarimage
Interpretingthebottomusingsonar
Itisimportanttounderstandhowtocorrectlyinterpretthebottom
structurerepresentedon-screen.
Thebottomusuallyproducesastrongecho.
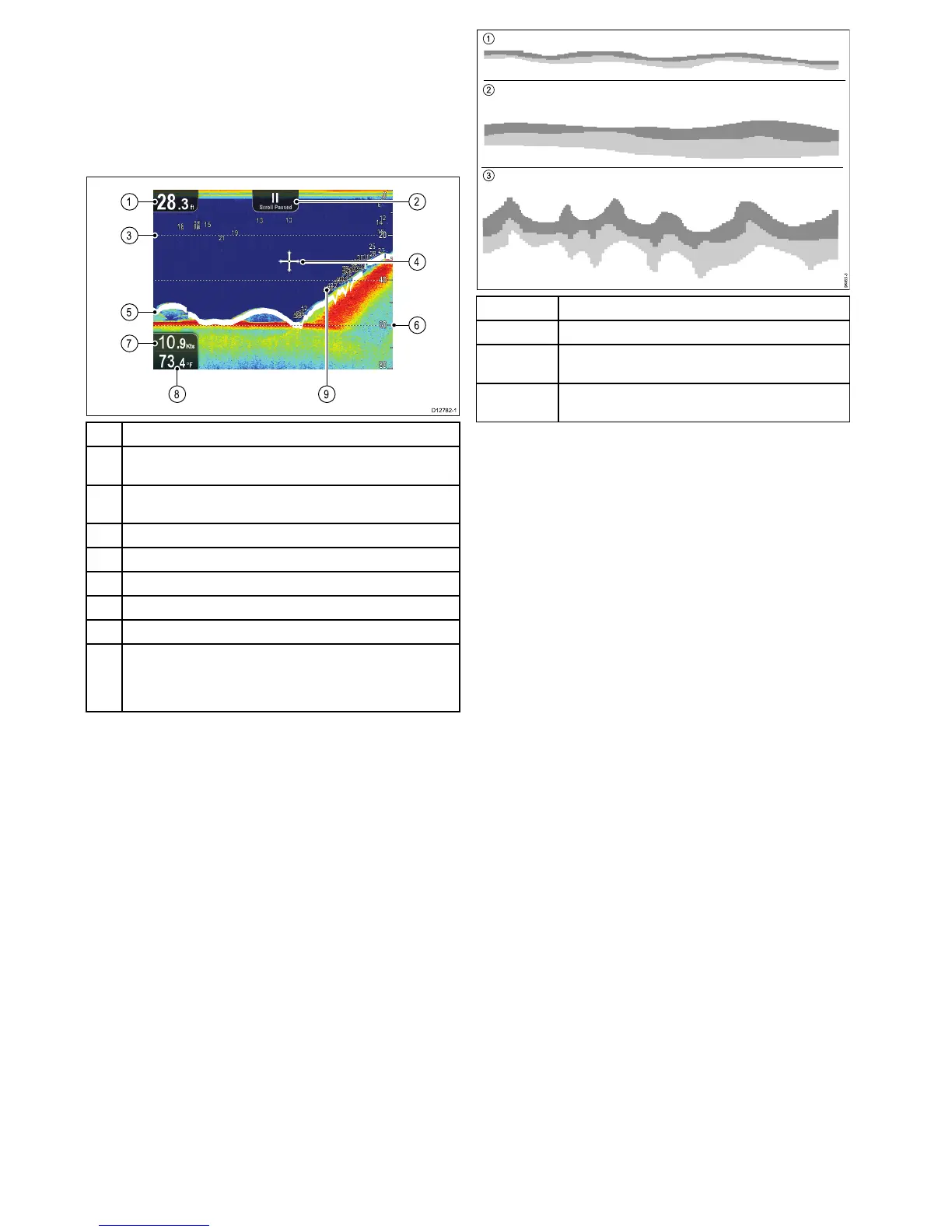
Thefollowingimagesshowhowdifferentbottomconditionsare
representedon-screen:
ItemDescription
1
Ahardbottom(sand)producesathinline.
2
Asoftbottom(mudorseaweedcover)producesawide
line.
3Arockyorunevenbottomorawreckproducesanirregular
imagewithpeaksandtroughs.
Thedarklayersindicateagoodecho;thelighterareasindicate
weakerechoes.Thiscouldmeanthattheupperlayerissoft
andthereforeallowingsoundwavestopasstothemoresolid
layerbelow.
Itisalsopossiblethatthesoundwavesaremakingtwocomplete
trips–hittingthebottom,bouncingoffthevessel,thenreecting
offthebottomagain.Thiscanhappenifthewaterisshallowor
thebottomishard.
Factorsinuencingthesonarimage
Thequalityandaccuracyofthedisplaycanbeinuencedbya
numberoffactorsincludingvesselspeed,depth,objectsize
andbackgroundnoise.
Vesselspeed
Theshapeofthetargetchangesalongwithyourspeed.Slower
speedsreturnatter,morehorizontalmarks.Higherspeeds
causethetargettothickenandarchslightly,atfastspeedsthe
markresemblesadoubleverticalline.
Targetdepth
Thecloserthetargettothesurface,thelargerthemarkon
screen.
Thedepthofindividualtargetscanbedisplayedbyswitching
ontheTargetDepthIDinthesonarmenuMenu>Display
Options.Thenumberoftargetdepthsdisplayedisinuenced
bytheshalarmsensitivitylevel.
Waterdepth
Aswaterdepthincreasessignalstrengthdecreases,resultingin
alighteron-screenimageofthebottom.
Sizeofthetarget
Thelargerthetarget,thelargerthereturnon-screen.Thesize
ofashtargetisalsodependentuponthesizeofthesh’sswim
bladderratherthanitsoverallsize.Theswimbladdervariesin
sizebetweendifferentbreedsofsh.
Clutter/Backgroundnoise
Thesonarimagemaybeimpairedbyechoesreceivedfrom
oatingorsubmergeddebris,particulatematter(suchas
plankton,phytoplankton,orsiltetc.),airbubblesoreventhe
vessel'smovement.Thisisknownas‘backgroundnoise’or
‘clutter’andiscontrolledbytheSensitivitysettings.Ifrequired
youcanadjustthesettingmanually.
68
Dragony/Dragony7
 Loading...
Loading...