174 Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Chapter 9 Motion Control
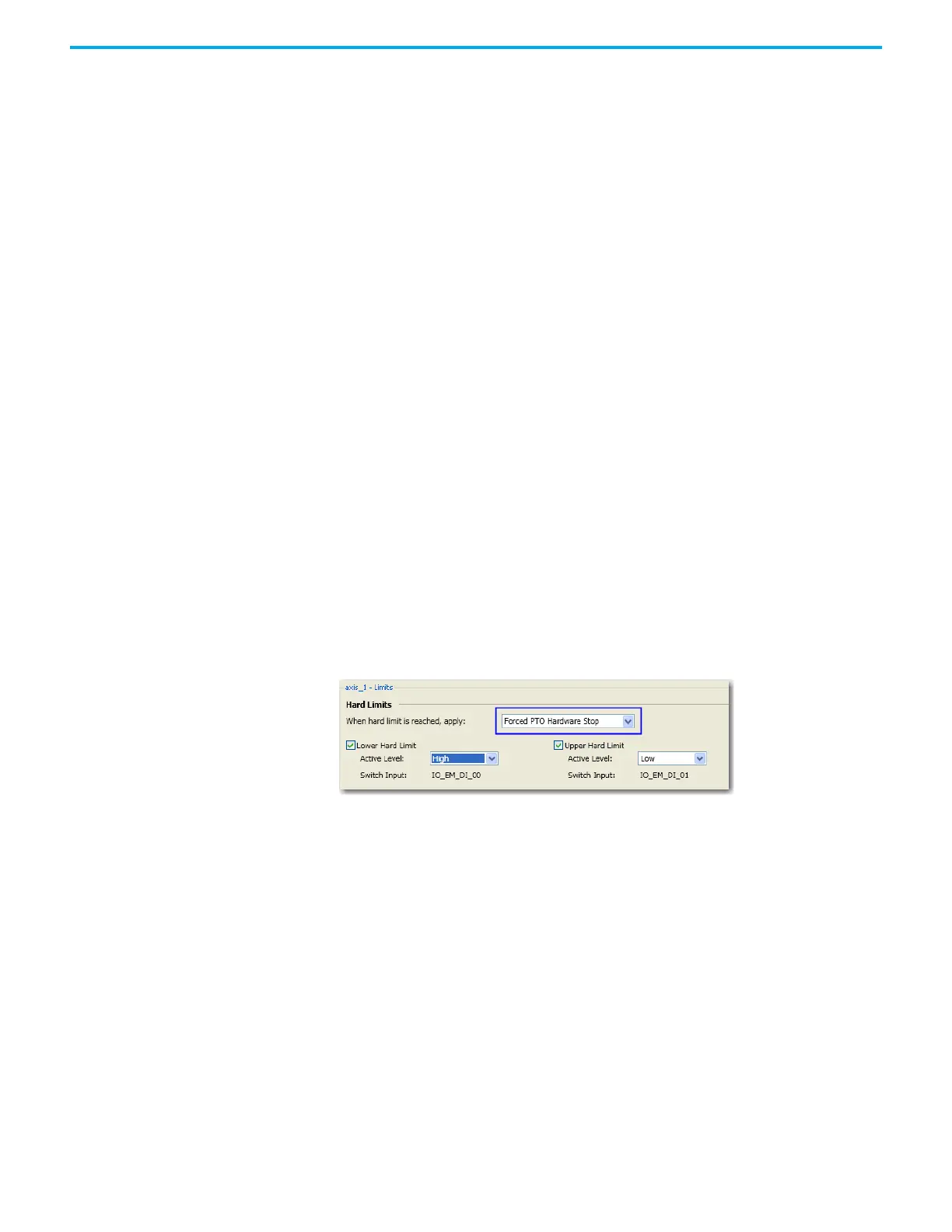
If both hard and soft limits are configured as enabled, for two limits in the same direction
(upper or lower), the limits should be configured such that the soft limit is triggered before the
hard limit.
PTO Pulse Limits
This limit parameter is not configurable by the user and is the physical limitation of the
embedded PTO. The limits are set at 0x7FFF0000 and -0x7FFF0000 pulses, for upper and lower
limits, respectively.
PTO pulse limits are checked by the controller unconditionally — that is, the checking is
always ON.
On a non-continuous motion, to prevent a moving axis going to ErrorStop status with Motion
PTO Pulse limits detected, user needs to prevent current position value going beyond PTO
Pulse limit.
On a continuous motion (driven by MC_MoveVelocity function block), when the current position
value goes beyond PTO pulse limit, PTO pulse current position will automatically roll over to 0
(or the opposite soft limit, if it is activated), and the continuous motion continues.
For a continuous motion, if the axis is homed, and the soft limit in the motion direction is
enabled, soft limit will be detected before PTO pulse limit being detected.
Motion Stop
There are three types of stops that can be configured for an axis.
Immediate Hardware Stop
This type of Immediate Stop is controlled by the hardware. If a Hard Stop on a Hard Limit
switch is enabled, and the Hard Limit has been reached, the PTO pulse for the axis will be cut
off immediately by the controller. The stop response has no delay (less than 1 µs).
Immediate Soft Stop
The maximum possible response delay for this type of stop could be as much as the Motion
Engine Execution time interval. This type of stop is applicable in the following scenarios:
• During motion, when axis PTO Pulse Limit is reached;
• One Hard Limit is enabled for an axis, but Hard Stop on Hard Limit switch is configured
as Off. If the Emergency Stop is configured as Immediate Software Stop, during motion,
when the Hard Limit switch is detected;
• One Soft Limit is enabled for an axis and the axis has been homed. If the emergency
stop is configured as Immediate Soft Stop, during motion, when the Soft Limit reach is
detected;
• The Emergency Stop is configured as Immediate Soft Stop. During motion, MC_Stop
function block is issued with Deceleration parameter equal to 0.
 Loading...
Loading...