324 Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Appendix E PID Function Blocks
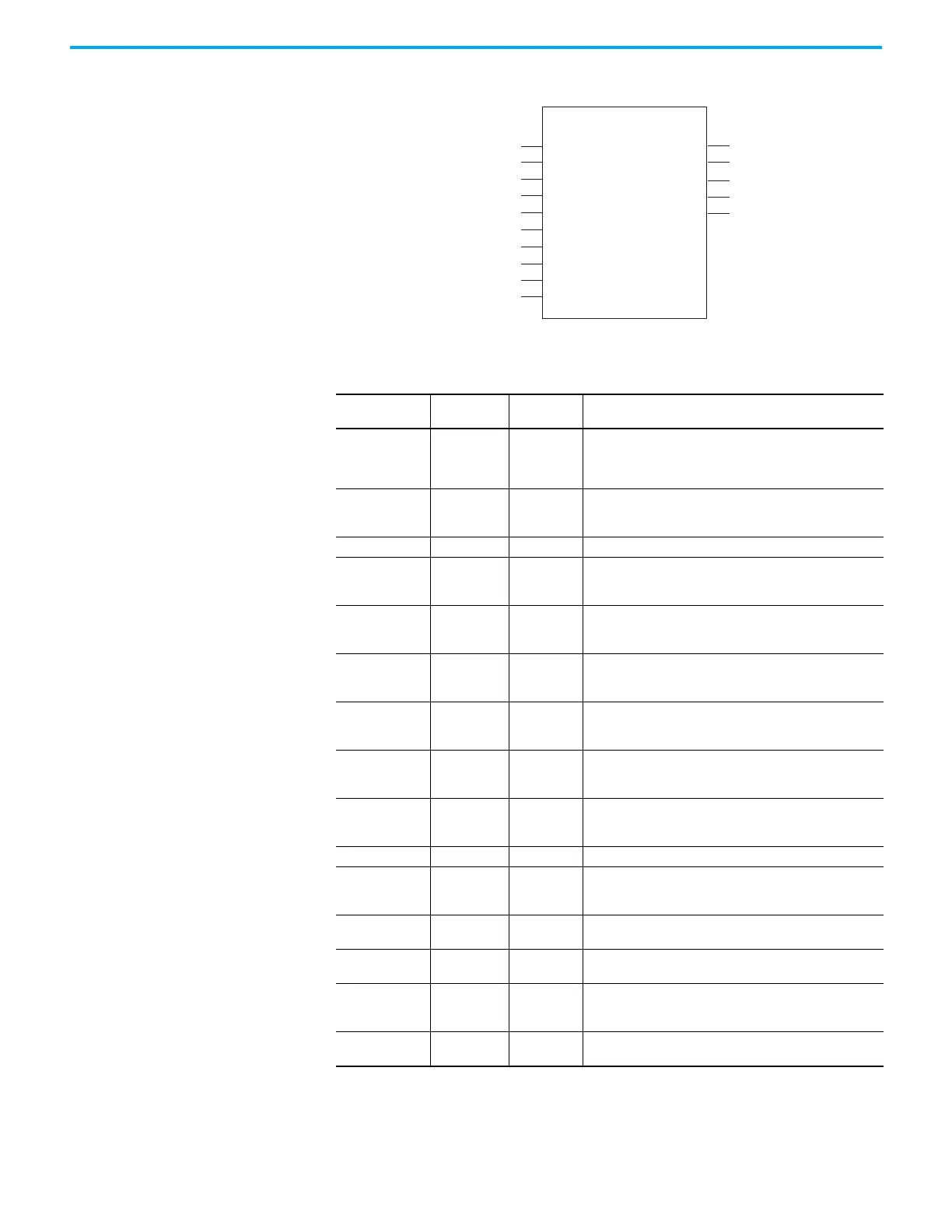
PID Function Block This function block diagram shows the arguments in the PID function block.
The following table explains the arguments used in this function block.
Table 83 - PID Arguments
Parameter
Parameter
Type
Data Type Description
Enable Input BOOL
Enable instruction.
TRUE = Start execution with current input parameters.
FALSE = CV equals zero.
PV Input REAL
Process Value. This value is typically read from an analog
input module.
The SI unit must be the same as Setpoint.
SP Input REAL The set point value for the process.
AutoManual Input BOOL
Auto or manual mode selection:
TRUE = Normal operation of PID.
FALSE = Manual operation using CVManual.
CVManual Input REAL
Control value input defined for manual mode operation. The
valid range for CVManual is:
CVMin < CVManual < CVMax
CVMin Input REAL
Control value minimum limit.
If CV < CVMin, then CV = CVMin.
If CVMin > CVMax, and error occurs.
CVMax Input REAL
Control value maximum limit.
If CV > CVMax, then CV = CVMax.
If CVMax < CVMin, an error occurs.
Gains Input PID_GAINS
Gains of PID for controller.
Use the PID_GAINS data type to configure the Gains
parameter.
Control Input BOOL
Control direction of the process:
TRUE = Direct acting, such as Cooling.
FALSE = Reverse acting, such as Heating.
Llnit Input BOOL Reserved for future use.
Active Output BOOL
Status of the PID controller:
TRUE = PID state is running.
FALSE = PID state is stopped.
CV Output REAL
The control value output.
If any error occurred, CV is 0.
AbsoluteError Output REAL
Absolute error is the difference between process value (PV)
and setpoint (SV) value.
Error Output BOOL
Indicates the existence of an error condition.
TRUE = PID has an error.
FALSE = PID has no errors.
ErrorID Output USINT
A unique numeric that identifies the error. The errors are
defined in PID error codes.
PID
PV
Active
CV
AbsoluteErrorSP
AutoManual
CVManual
CVMax
CVMin
Gains
Control
Error
Error ID
Llnit
Enable
 Loading...
Loading...