Rockwell Automation Publication 2080-UM002N-EN-E - November 2022 359
Appendix H User-defined Function Block Motion Instructions
The Device Object Cfg values must:
• Set Cfg.MotionResolution = GearRatioMasterCounts ID152 (P1.045) -> Motion Counts/
Motor Revolution.
• Set Cfg.ConversionConstant based on the Counts/Position Unit -> Motion Counts/
Position Unit that is required for your application.
The example in Figure 39
results in Position Units = motor rotations. Now, entry values that
originally used drive counts can be entered as motor rotations.
raC_UDT_Itf_K5100_Set
raC_UDT_Itf_K5100_Set is the User-Defined Data Type for device settings. Its members provide
application program access to allow or inhibit commands and settings from other external
sources. The table below shows member names, descriptions, and tag data types.
For example, to inhibit write commands from the other external sources write a 1 to the
ModuleName_CtrlSet.InhibitCmd program tag from your application program. This write
prevents a jog command from other external sources.
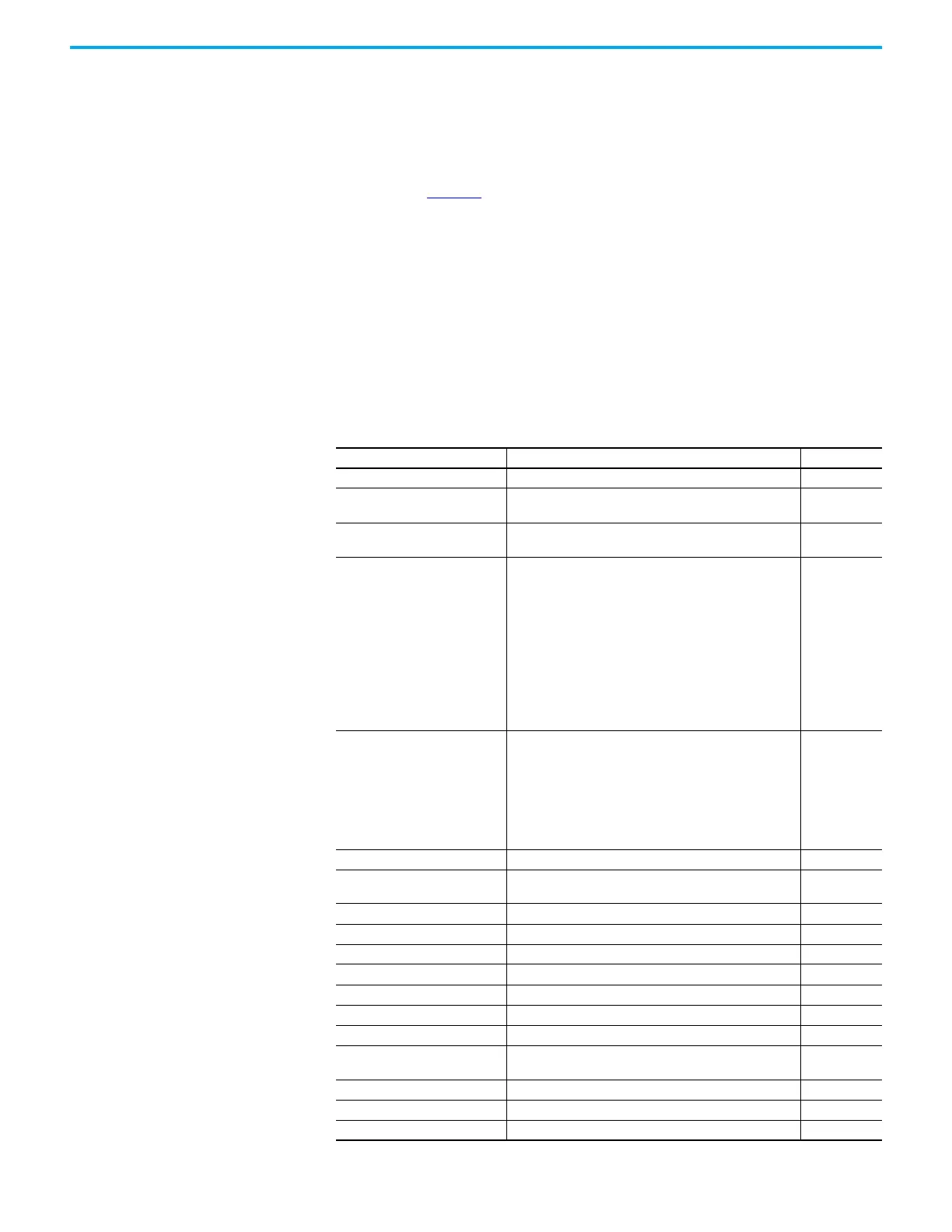
Table 104 - raC_UDT_Itf_K5100_Set Data Types
Member Description DataType
bInhibit Bit overlay for external access restriction DINT
InhibitCmd
1 = Inhibit user Commands from external sources; 0 = Allow
Control. This is only used with the optional device faceplate.
BOOL
InhibitSet
1 = Inhibit user Settings from external sources; 0 = Allow
This member is only used with the optional device faceplate.
BOOL
OperatingMode
Determines the drive operating mode when ‘Start Motion’ has
a zero-to-one transition.
1 - Position mode
2 - Speed mode
3 - Home mode
4 - Torque mode
5 - Gear mode (Fixed Ratio, based on present E-gear ratio)
6 - Index mode
7 - Reserved
8 - Gear Mode (Variable Ratio, based on Master/Slave tag
values)
9 - Enhanced MAT mode
DINT
MoveType
Specify the type of move.
0 = Absolute
1 = Incremental
2 = Rotary Shortest Path
3 = Rotary Positive
4 = Rotary Negative
7 = Relative
8 = Capture
DINT
PositionCommandOverlap Allows overlapping of successive movements. BOOL
PositionCommandOverride
Allows interruption of current movement, replacing it with a
new movement.
BOOL
CapturedPositionSelect Capture position selection (First capture or second capture). BOOL
Position Determines the command position. REAL
Velocity Determines the command speed. REAL
Accel Determines the command acceleration. REAL
Decel Determines the command deceleration. REAL
Torque Determines the command torque. DINT
TorqueRampTime Determines the command torque ramp time. DINT
StartingIndex
This entry is the PR (Position Register) the drive should
execute.
DINT
HomingMethod Homing Method. DINT
HomeReturnSpeed Determines the command home return speed. REAL
CamMasterReference Future: Determines the master position reference of CAM. DINT
 Loading...
Loading...