Rockwell Automation Publication 2080-UM002N-EN-E - November 2022 355
Appendix H User-defined Function Block Motion Instructions
Kinetix 5100 Drive Device
Object UDFB
The Device Object UDFB comes with the UDFB motion instructions that is downloaded from the
PCDC. Each Kinetix 5100 drive requires a unique instance of the Device Object UDFB. This UDFB
provides a single software interface that is used by each drive that commands the drive and
provides the drive status you can use with your application logic.
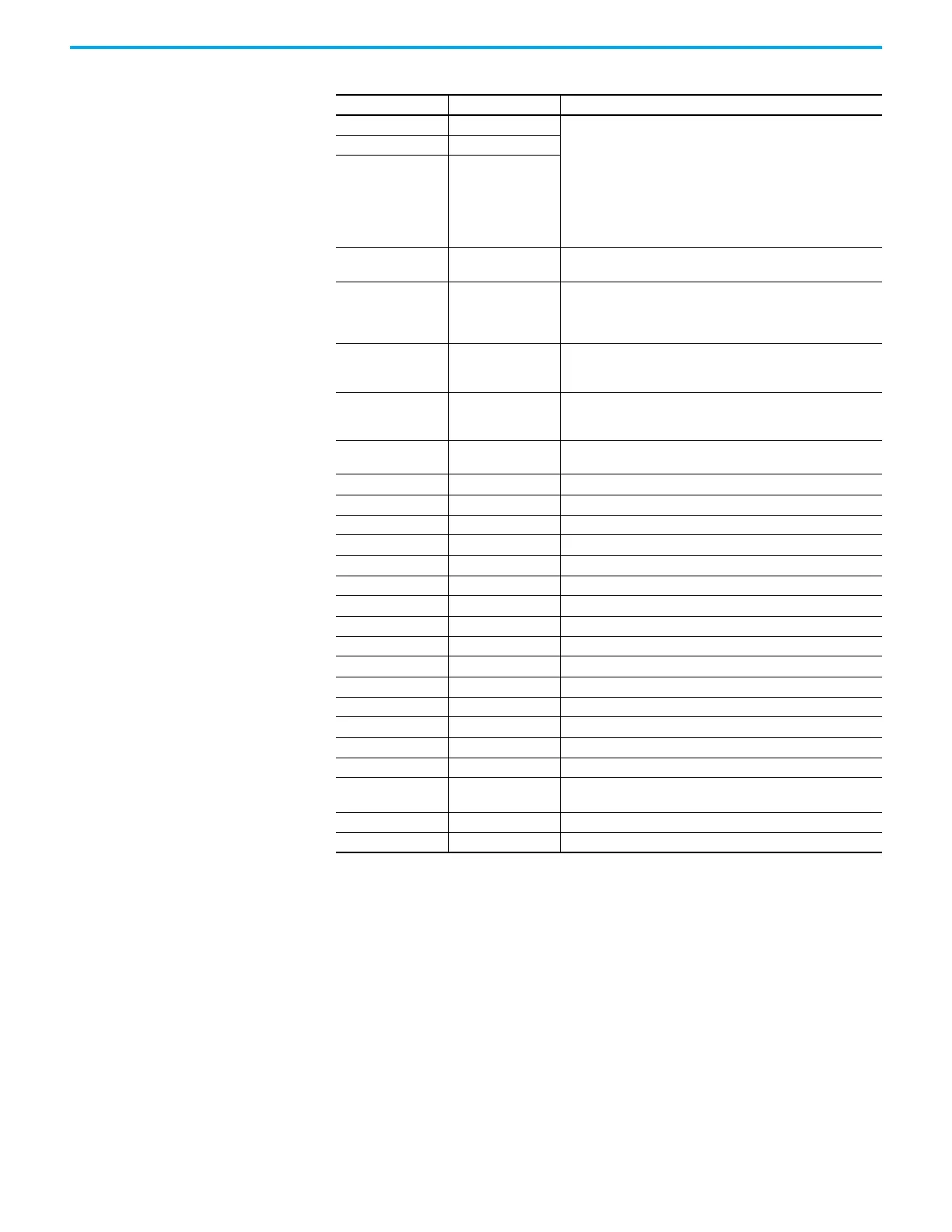
Freq_PosSel1 BOOL Frequency and Position selection.
000 = Frequency and Position Step 0
001 = Frequency and Position Step 1
010 = Frequency and Position Step 2
011 = Frequency and Position Step 3
100 = Frequency and Position Step 4
101 = Frequency and Position Step 5
110 = Frequency and Position Step 6
111 = Frequency and Position Step 7
Freq_PosSel2 BOOL
Freq_PosSel3 BOOL
FindHome BOOL
Next start command causes the drive to find home.
1 = Find Home
HoldStep BOOL
Overrides other inputs and causes the drive to remain at its
current step (running at zero speed once it reaches its position)
until released.
1 = Hold Step
PosRedefine BOOL
Resets the home position to the current position of the machine.
Set this bit to 0 after the homing routine is completed.
1 = Pos Redefine
SyncEnable BOOL
Hold the existing frequency when Sync Time is set to enable Speed
Synchronization.
1 = Sync Enable
TravDisable BOOL
Disable Traverse function.
1= Traverse Disable
_ENO BOOL Indicates that the UDFB is executing.
Ready BOOL Indicates that the drive is ready for operation.
Active BOOL Indicates that the drive is operating.
Faulted BOOL Indicates fault state.
OutputFreq REAL Displays the reference speed of the drive.
ActualDir STRING Indicates the rotating direction.
AtRef BOOL Indicates that drive is at reference speed.
AtPos BOOL Indicates that drive is at commanded position.
TravelPosDir BOOL Indicates the Travel Position direction.
Accel_Sts BOOL Indicates acceleration state.
Decel_Sts BOOL Indicates deceleration state.
AtHome BOOL Indicates that drive is at the reference home.
DriveHomed BOOL Indicates whether the drive has been homed since power-up.
Ref_Output PowerFlex525P_O Reference the output data structure of the drive to control.
SyncHold BOOL Indicates if the frequency is holding.
SyncRamp BOOL
Indicates if the frequency is accelerating to the new commanded
frequency in drive parameter A571 [Sync time].
TraverseOn BOOL Indicates if Traverse is enabled.
TraverseDecel BOOL Indicates if the drive is decelerating in Traverse Mode.
Table 101 - UDFB for RA_PF525_POS (Continued)
Operand Type Description
 Loading...
Loading...