326 Rockwell Automation Publication 2080-UM002N-EN-E - November 2022
Appendix E PID Function Blocks
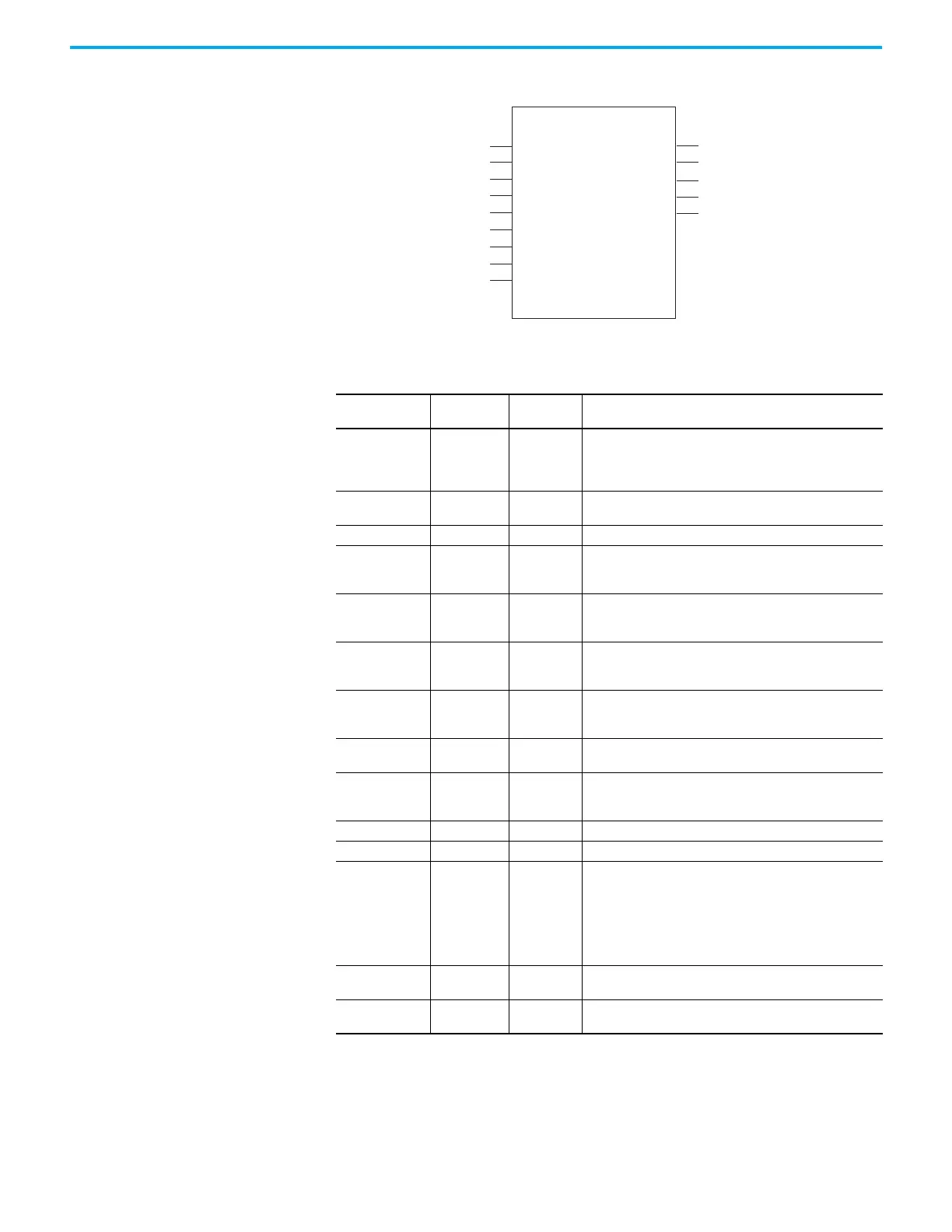
IPIDCONTROLLER Function
Block
This function block diagram shows the arguments in the IPIDCONTROLLER function block.
The following table explains the arguments used in this function block.
Table 86 - IPIDCONTROLLER Arguments
Parameter
Parameter
Type
Data Type Description
EN Input BOOL
Function block enable
TRUE = Execute function.
FALSE = Do not execute function.
Applicable to Ladder Diagram programs.
Process Input REAL
Process value, which is the value measured from the process
output.
SetPoint Input REAL The set point value for the process.
Feedback Input REAL
Feedback signal, which is the value of the control variable
applied to the process.
For example, the feedback can be IPIDCONTROLLER output.
Auto Input BOOL
Operating modes of PID controller:
TRUE = Normal operation of PID.
FALSE = Output tracks Feedback.
Initialize Input BOOL
A change in value (TRUE to FALSE or FALSE to TRUE) causes
the controller to eliminate any proportional gain during that
cycle. It also initializes AutoTune sequences.
Gains Input GAIN_PID
Gains PID for IPIDCONTROLLER.
Use the GAIN_PID data type to define the parameters for the
Gains input.
AutoTune Input BOOL
TRUE = Autotune.
FALSE = No Autotune.
ATParameters Input AT_Param
AutoTune parameters
Use AT_Param data type to define the parameters for the
ATParameters input.
Output Output Real Output value from the controller.
AbsoluteError Output Real Absolute error (Process - SetPoint) from the controller.
ATWarnings Output DINT
Warning for the AutoTune sequence. Possible values are:
0 = No auto tune done.
1 = In auto tune mode.
2 = Auto tune done.
-1 = Error 1: Input automatically set to TRUE, no auto tune
possible.
-2 = Error 2: Auto tune error, the ATDynamSet expired.
OutGains Output GAIN_PID
Gains calculated from AutoTune Sequences.
Use GAIN_PID data type to define the OutGains output.
ENO Output BOOL
Enable output.
Applicable to Ladder Diagram programs.
IPIDCONTROLLERIPIDCONTROLLER
Process
ENO
Output
AbsoluteErrorSetPoint
FeedBack
Auto
Initialize
Gains
AutoTune
ATParameters
ATWarning
OutGains
EN
 Loading...
Loading...