5
5.5 SIMODRIVE POSMO A functions
5-155
Siemens AG 2013 All Rights Reserved
SIMODRIVE POSMO A User Manual (POS1) – 08/2013 Edition
5.5 SIMODRIVE POSMO A functions
5.5.1 Referencing
For SIMODRIVE POSMO A, an incremental position measuring
system is used. In order that the positioning motor identifies the axis
zero, the measuring system must be synchronized with the axis.
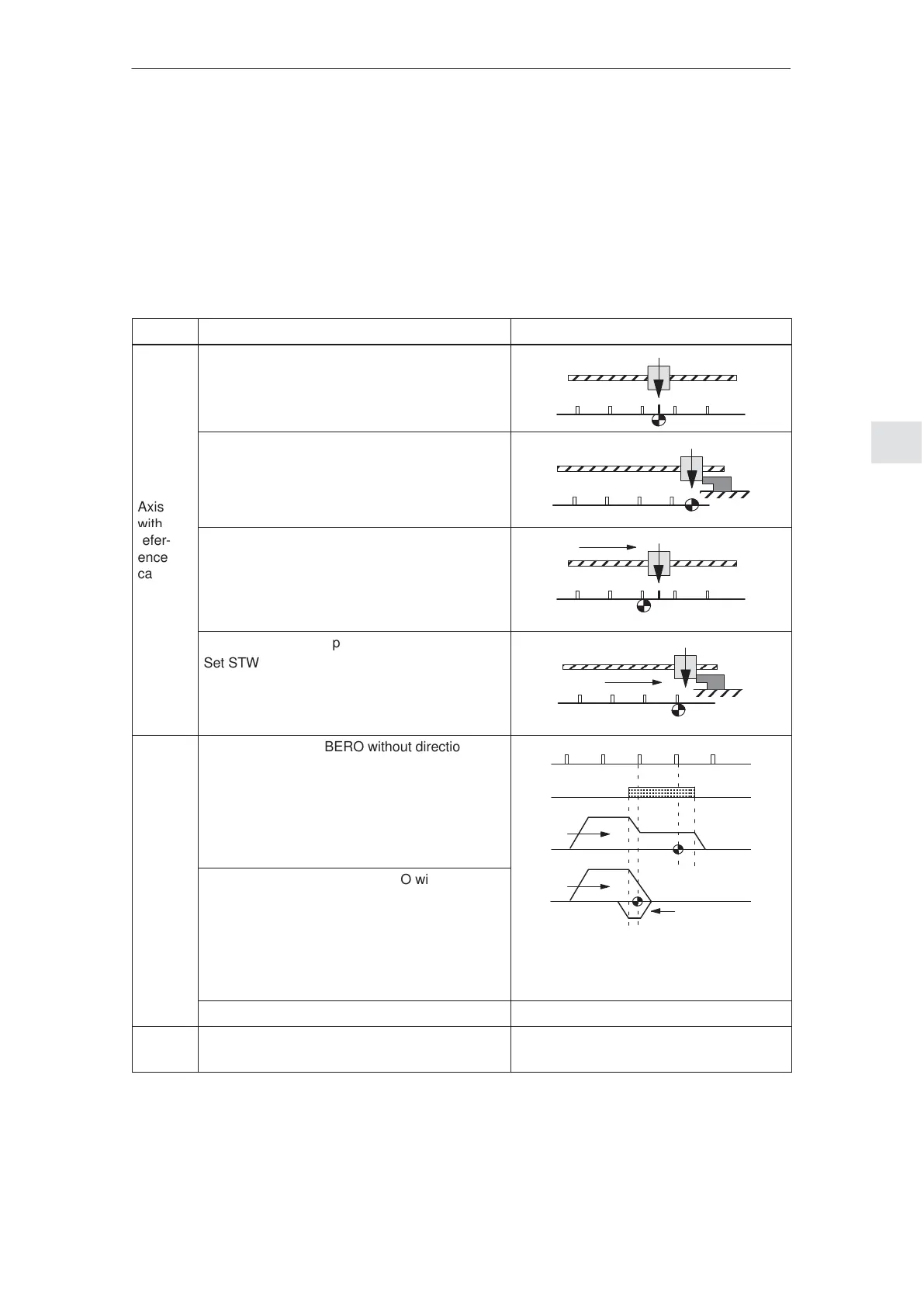
Table 5-7 What are the referencing possibilities?
Type
Referencing possibilities Sketch
Approach the visual mark
Set the actual value by writing into P40
––> This position is assigned to the required
actual value.
Axis
Approach the endstop
Set the actual value by writing into P40
––> This position is assigned to the required
actual value.
refer-
ence
cams
Approach the visual mark
Set STW.11
––> The position of the last zero mark which
was passed is overwritten by the value from
P5
1)
(reference point coordinate).
Approach the endstop
Set STW.11
––> The position of the last zero mark which
was passed is overwritten by the value from
P5
1)
(reference point coordinate).
Axis
Reference travel to BERO without direction re-
versal
––> The axis remains stationary after exiting the
reference cam.
The position of the last zero mark which was
passed is overwritten with the reference posi-
tion
1)
.
refer-
ence
cams
2)
Reference approach to the BERO with direction
reversal
––> The axis remains stationary after exiting the
reference cam.
The position of the last zero mark which was
passed is overwritten with the reference posi-
tion
1)
.
Reference to occurring zero mark (from SW 2.1) Refer to Chapter 5.5.1
Flying ”Flying actual value setting” function
(from SW 1.4)
Refer to Chapter 5.5.2
1) The actual position to be written is corrected by the distance which was traveled since the last zero mark.
2) This function must be emulated using the existing traversing blocks (refer to the following examples).
Description
5 Description of the Functions
02.9908.04
 Loading...
Loading...










