5
5.5 SIMODRIVE POSMO A functions
5-179
Siemens AG 2013 All Rights Reserved
SIMODRIVE POSMO A User Manual (POS1) – 08/2013 Edition
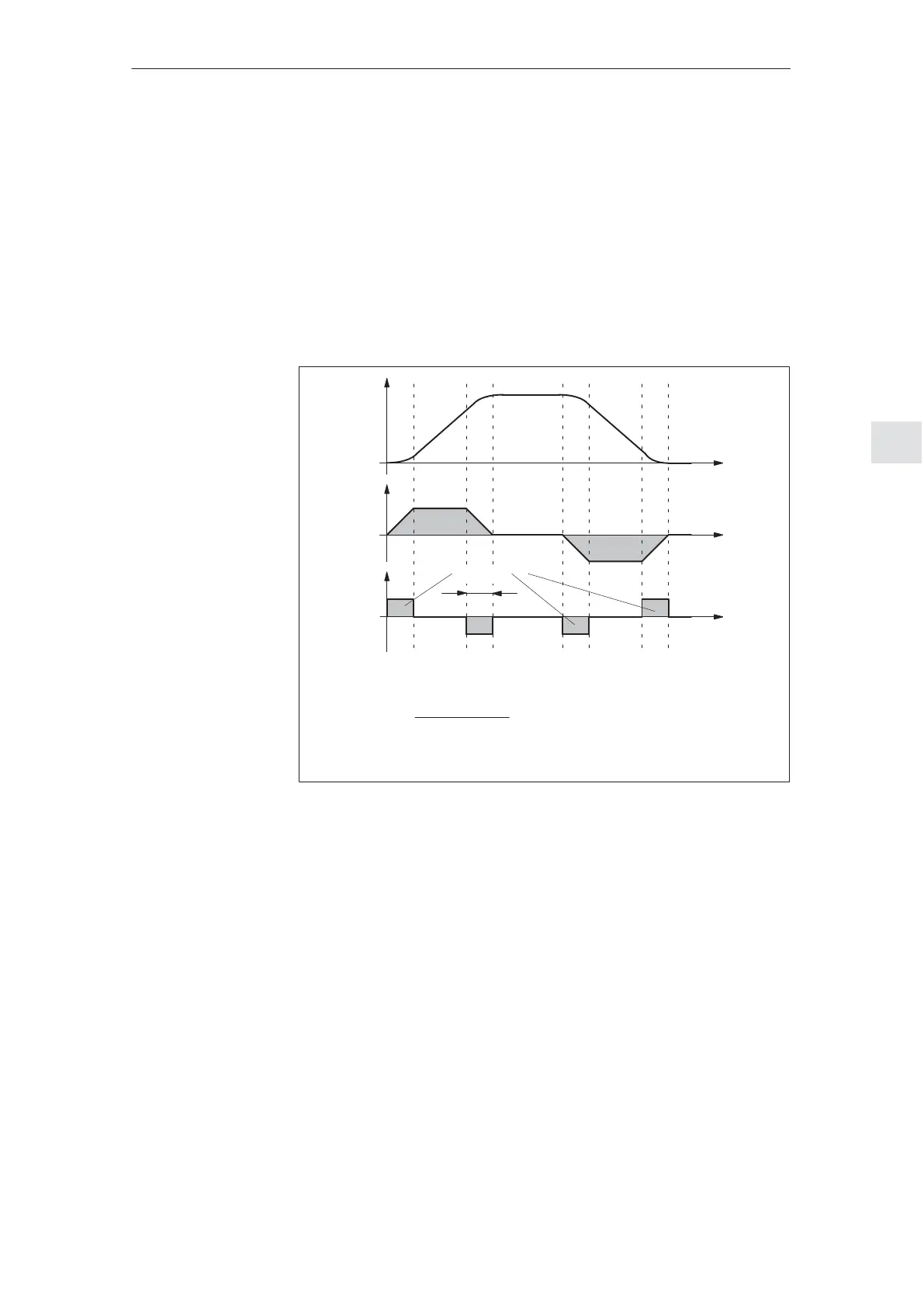
5.5.6 Jerk limitation
Acceleration and deceleration are step–like if jerk limiting is not used.
Using jerk limiting, a ramp–type increase can be parameterized for both
quantities, so that approach and braking are ”smooth” (jerk–limited).
Jerk limiting can be used, e.g. for positioning tasks using liquids or gen-
erally to reduce the mechanical stressing on an axis.
r
a
v
t
t
t
P22
P22
P23 = T
R
[s] =
a [mm/s
2
]
r [mm/s
3
]
a : Acceleration
r: Jerk
t: Time
T
R
: Jerk time
v: Velocity
P23
Fig. 5-14 Jerk limitation
P23 Jerk time constant
P22 Maximum acceleration
Description
Applications
Parameter
(refer to Chapter
5.6.2)
5 Description of the Functions
02.99
 Loading...
Loading...










