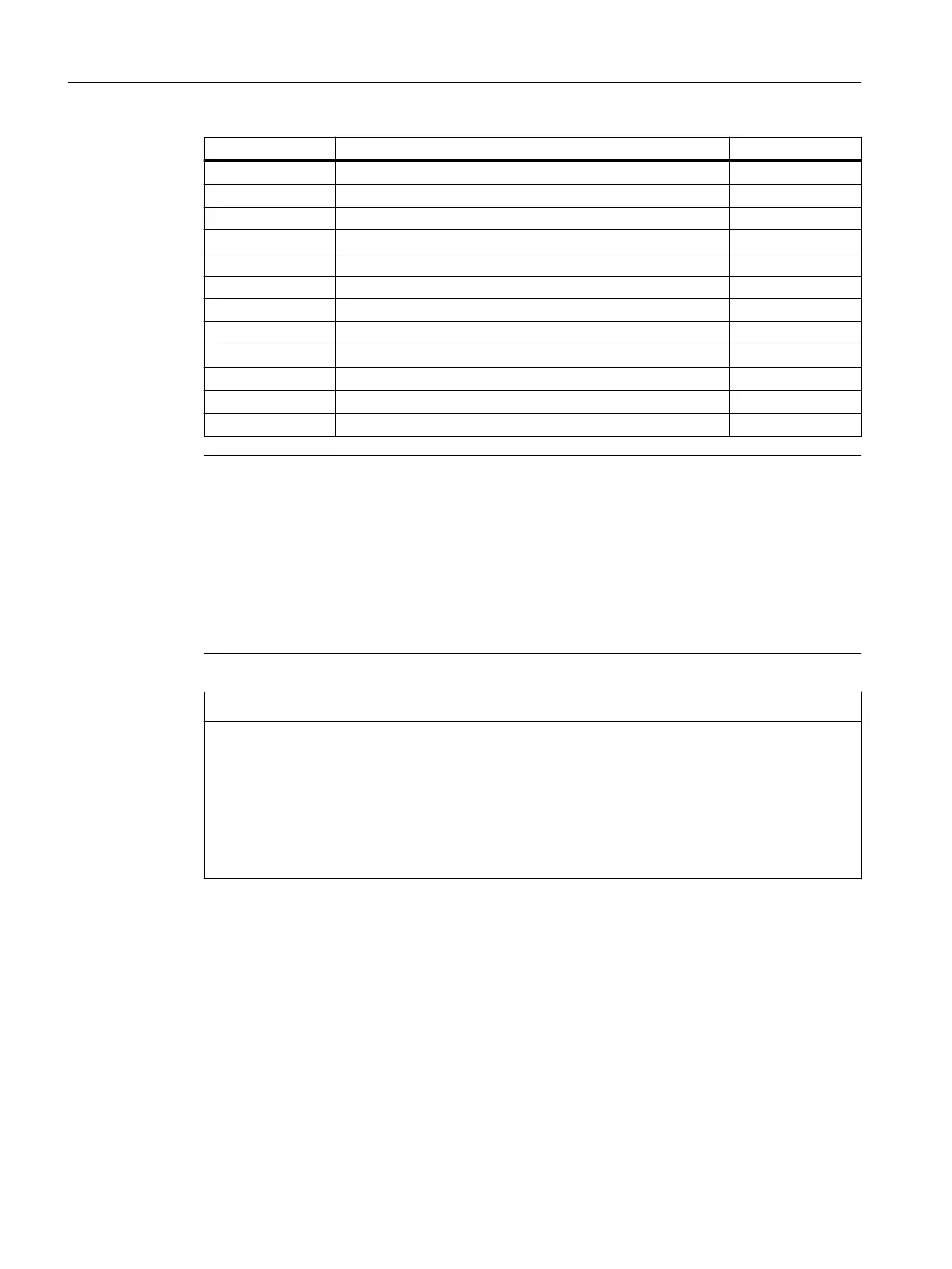
Number Name Factory setting
p1091[D] Skip speed 1 0rpm
p1092[D] Skip speed 2 0rpm
p1093[D] Skip speed 3 0rpm
p1094[D] Skip speed 4 0rpm
p1098[C] CI: Skip speed scaling 1
r1099 CO/BO: Skip frequency band of status word -
p1101 Skip speed bandwidth 0 rpm
p1106 CI: Minimum speed signal source 0
r1112 CO: Speed setpoint according to minimum limit - rpm
r1114 CO: Setpoint after direction limiting - rpm
r1119 CO: Ramp-function generator setpoint at the input - rpm
r1170 CO: Speed controller setpoint sum - rpm
Note
In order that a stationary motor – after all of the enable signals have been switched on, can
operate at the minimum
speed/minimum velocity once all of the enable signals are available, the direction must be
entered using one of the
following options:
- direction input via small setpoint.
- direction input by inhibiting the negative or positive direction (p1110, p1111).
NOTICE
Incorrect direction of motor rotation if the parameterization is not suitable
If you are using an analog input as speed setpoint source, then for a setpoint=0V, noise
voltages can be superimposed on the analog input signal. After the on command, the motor
accelerates up to the minimum frequency in the direction of the random polarity of the noise
voltage. A motor rotating in the wrong direction can cause signicant material damage to the
machine or system.
• Inhibit the motor direction of rotation that is not permissible.
Advanced commissioning
8.18Setpoint processing
SINAMICS G120C Converters
284 Operating Instructions, 02/2023, FW V4.7 SP14, A5E34263257B AK