Control optimization required
In some cases, the self optimization result is not satisfactory, or self optimization is not possible
as the motor cannot freely rotate.
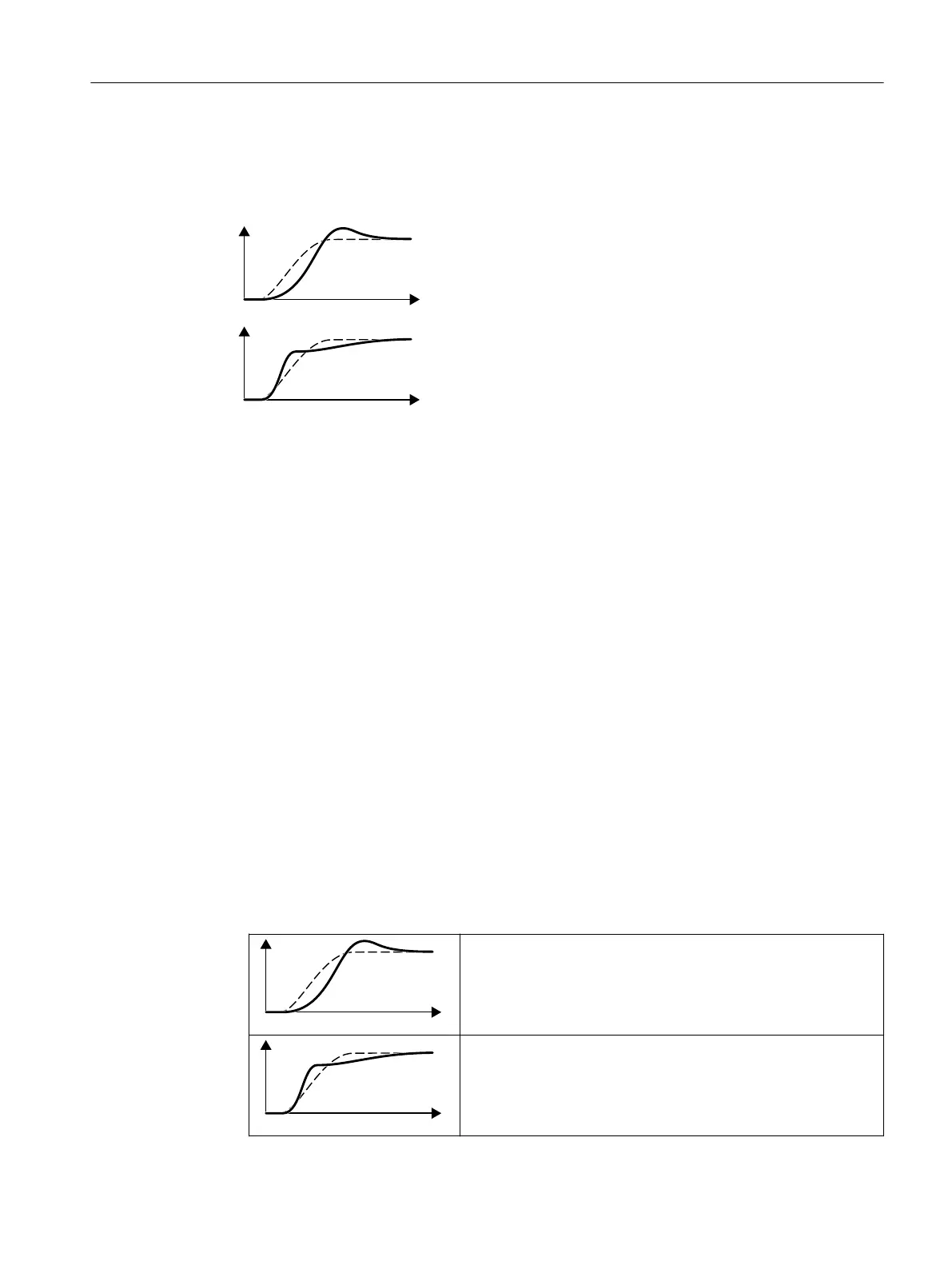
Initially, the speed actual value follows the speed setpoint with
some delay, and then overshoots the speed setpoint.
First, the actual speed value increases faster than the speed
setpoint. Before the setpoint reaches its nal value, it passes the
actual value. Finally, the actual value approaches the setpoint
without any signicant overshoot.
In the two cases describe above, we recommend that you manually optimize the speed
control.
Optimizing the speed controller
Requirements
• Torque precontrol is active: p1496 = 100%.
• The load moment of inertia is constant and independent of the speed.
• The converter requires 10%… 50% of the rated torque to accelerate.
When necessary, adapt the ramp-up and ramp-down times of the ramp-function generator
(p1120and p1121).
Procedure
1. Switch on the motor.
2. Enter a speed setpoint of approximately 40%of the rated speed.
3. Wait until the actual speed has stabilized.
4. Increase the setpoint up to a maximum of 60% of the rated speed.
5. Monitor the associated characteristic of the setpoint and actual speed.
6. Optimize the controller by adapting the ratio of the moments of inertia of the load and motor
(p0342):
Initially, the speed actual value follows the speed setpoint with
some delay, and then overshoots the speed setpoint.
• Increase p0342
Initially, the speed actual value increases faster than the speed
setpoint. The setpoint passes the actual value before reaching its
nal value. Finally, the actual value approaches the setpoint with‐
out any overshoot.
• Reduce p0342
Advanced commissioning
8.20Motor control
SINAMICS G120C Converters
Operating Instructions, 02/2023, FW V4.7 SP14, A5E34263257B AK 313