User Manual
EM303A General Purpose Inverter
110
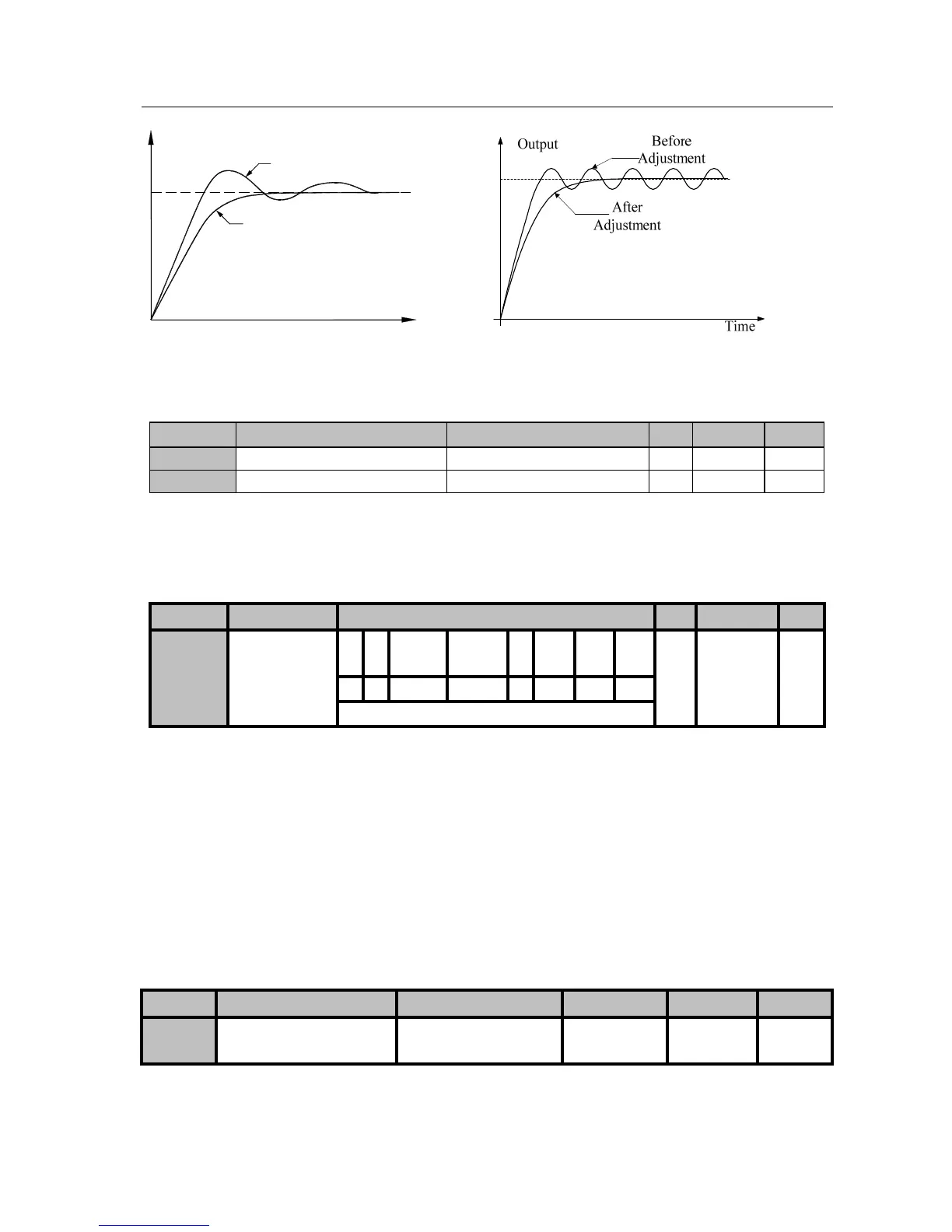
Figure 7-15
Output overshoot Suppression
Figure7-16
Output periodic oscillation suppression
No.
Function
Range
Unit Default
Type
F4-11 PID Positive Output Limit 0.00~100.00 % 100.00 ●
F4-12 PID Negative Output Limit 0.00~100.00 % 0.00 ●
F4-11 Limiting the range of positive PID output. If consecutive positive feedback
occurs, PID operation will not proceed when reached the limit.
F4-11 Limiting the range of negative PID output. If consecutive negative feedback
occurs, PID calculation will not proceed when reached the limit.
No.
Function
Range
Unit Default
Type
F4-15
Monitoring
Reference
Selection
**
Estimated
Slip
Estimated
Speed
*
Sync-
Freq.
Inp.
Freq.
Outp.
Freq.
1111 1111 〇
0 0 1 1 1 1 1 1
0:Absolute Value, 1:+/-
Bit setting value=0
Monitoring frequency shows absolute value when motor forwards/reverses.
Bit setting value=1
Monitoring frequency shows positive/negative value when motor forwards/ reverses.
F4-15 is bit operation, only set corresponding bit of monitoring frequency = 0/1.
For instance: when motor forwards/reverses, the monitoring output frequency and
estimated slip frequency shows positive/negative value respectively, but monitoring the
other frequency shows absolute value, only set the 0
th
bit=1 (corresponding to the output
frequency) and the 5
th
bit=1 (corresponding to the estimated slip), and set other bits = 0,
i.e. F4-15=XX10X001.
No.
Function
Range
Unit Default
Type
F4-16 LCD Language Options
0: Chinese
1: English
0 〇
F4-16=0 Chinese displayed on LCD keypad.
F4-16=1 English displayed on LCD keypad.
Output
After
Adjustment
Before
Adjustment
Time
 Loading...
Loading...

