55
The unit
’
s place of this parameter is active with panel control mode to operate jog
.
Unit
’
s place of LED :
0
0
0
0 : Jog
Jog
Jog
Jog forward
forward
forward
forward in
in
in
in panel
panel
panel
panel control
control
control
control mode
mode
mode
mode
1
1
1
1 : Jog
Jog
Jog
Jog reverse
reverse
reverse
reverse in
in
in
in panel
panel
panel
panel control
control
control
control mode
mode
mode
mode
Ten
’
s place of LED :
0
0
0
0 : Reverse
Reverse
Reverse
Reverse running
running
running
running is
is
is
is permissible.
permissible.
permissible.
permissible.
1
1
1
1 : Reverse
Reverse
Reverse
Reverse running
running
running
running is
is
is
is prohibit.
prohibit.
prohibit.
prohibit. The inverter will stop output when reverse command is input.
It is the transition time at zero frequency time when the inverter switch ing its running direction, as shown in Fig.4-1 as t
1 .
Fig.
Fig.
Fig.
Fig. 4-1
4-1
4-1
4-1 Run
Run
Run
Run forward/reverse
forward/reverse
forward/reverse
forward/reverse dead
dead
dead
dead time
time
time
time
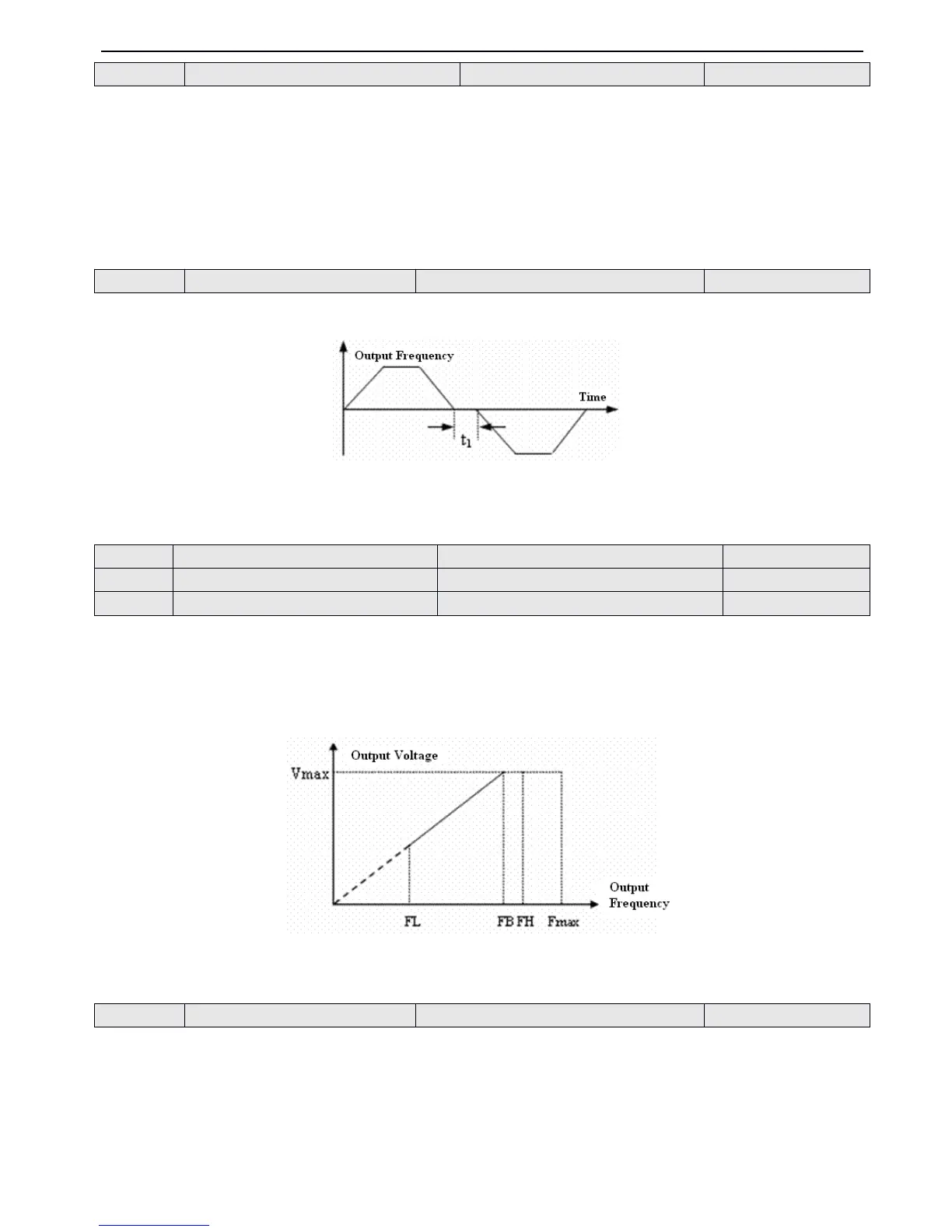
The max output frequency is the highest permissible frequency of the inverter, as shown in Fig.4-2 .
Basic running frequency is the lowest frequency when the inverter output the highest voltage and it is usually rated
frequency of the motor, as shown in Fig4-2 as
FB
.
The ma x output voltage is the relevant output voltage w hen the inverter output basic running frequency and it is usually
rated voltage of the motor
,
as shown in Fig.4-2 as Vmax.
Fig.
Fig.
Fig.
Fig. 4
4
4
4 -
2
2
2
2
Characteristic
Characteristic
Characteristic
Characteristic parameter
parameter
parameter
parameter
FH
,
FL are d e fined
by
P0.19 and P0.20 as upper limit of of frequency and lower limit of frequency .
In order to compensate the torque drop at low frequency
,
the inverter can be boost the output voltage so as to boost the
torque, the torque boost of constant torque c urve and square torque curve are shown in Fig. 4-3 as
a,
b.
 Loading...
Loading...