64
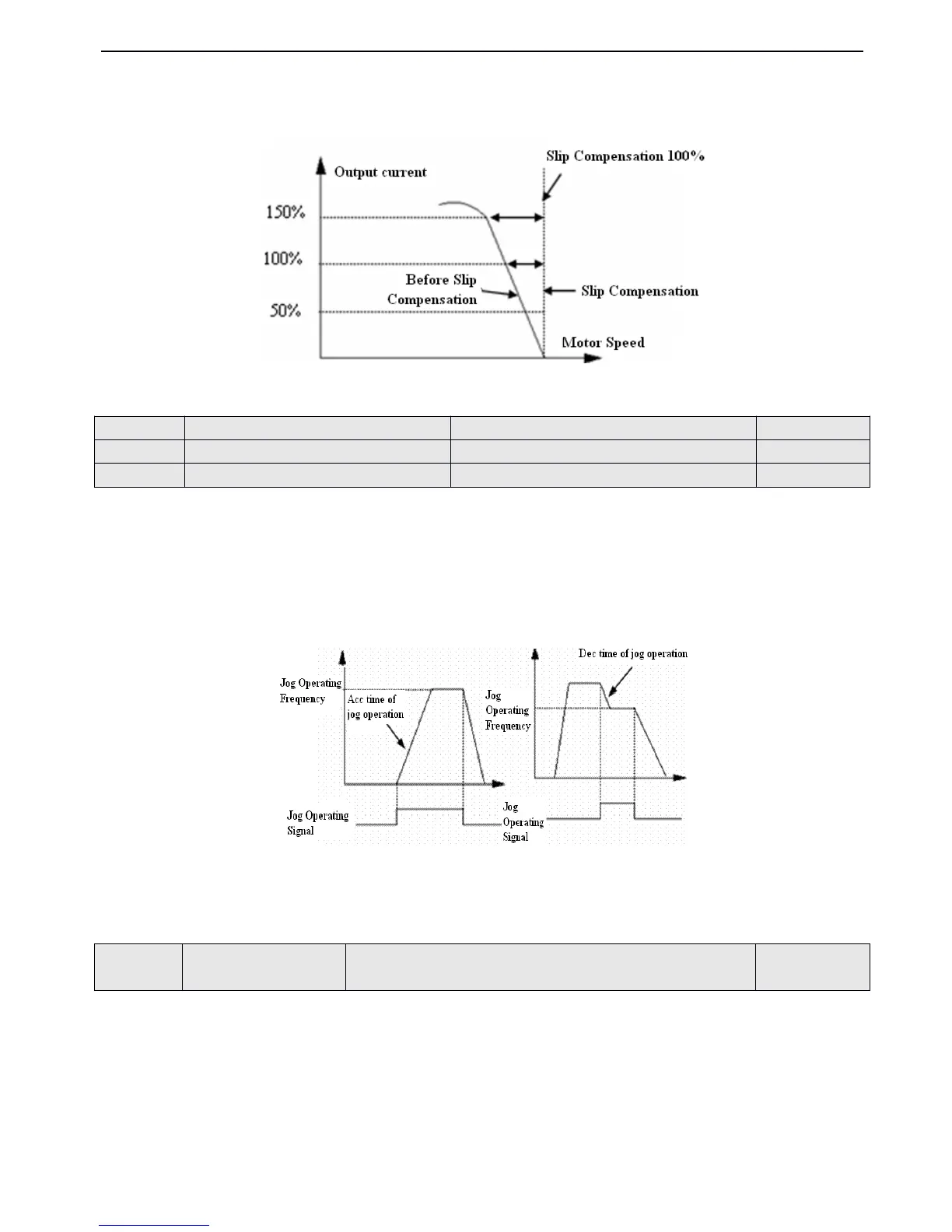
speed at a certain value wit h dynamic compensation for slip frequency of asy nchronism motor. I f use auto-torque boost
function in add ition, better low speed moment c haracteristic can be get. As shown in Fig.4-13.
Fig.
Fig.
Fig.
Fig. 4-13
4-13
4-13
4-13 Slip
Slip
Slip
Slip Compensation
Compensation
Compensation
Compensation
Jog operating frequency has the highest priority
.
No matter what statu s the inverter is in, once there is a jog operating
command input, the inverter will run into jog operating frequency w ithin Acc/Dec time of jog operation, as shown in Fig.4-
14.
Acc time of jog operation means the time needed for inverter from
0
Hz to upper limit of frequency, Dec time of jog
operation means the time needed for inverter from upper limit of frequency to
0
Hz.
Fig
Fig
Fig
Fig 4-14
4-14
4-14
4-14 Jog
Jog
Jog
Jog operation
operation
operation
operation
Note
Note
Note
Note :
:
:
: (1) Jog operation can be controlled
by
panel, terminal and serial port .
(2) If jog operation command has been canceled, the inverter will stop according to Dec-to-time.
You
can change baud rate, digital format and communication mode
by
setting unit
’
s place, ten
’
s place and hundred
’
s place
of P3.09 .
Unit
Unit
Unit
Unit
’
’
’
’
s
s
s
s place
place
place
place of
of
of
of LED
LED
LED
LED : Set baud rate
,
the value s are shown below:
0 : 1200BPS
1 : 2400BPS
2 : 4800BPS
3 : 9600BPS
4 : 19200BPS
 Loading...
Loading...