80
Both
the external
reference signal
and
feedback signal have interference
s,
w
hile
these
can
be
filte
re
d by
setting
the
time constant
of
filter
(P7.03
and
P7.04), the
longer
the
filter
time, the better the immunity
capability,
but the
slower
the
response; on
the
contrary,
the shorter the
filter
time
,
the
worse
the immunity
capability
,
but the
quicker
the
response.
If
P7.01=0
,
the value set
by
P7.05
will
be
as the
reference of close-loop control system
.
Therefore,
you
can modify the value
of
P7.05
to
change
if
via operation
keyboard or serial
port.
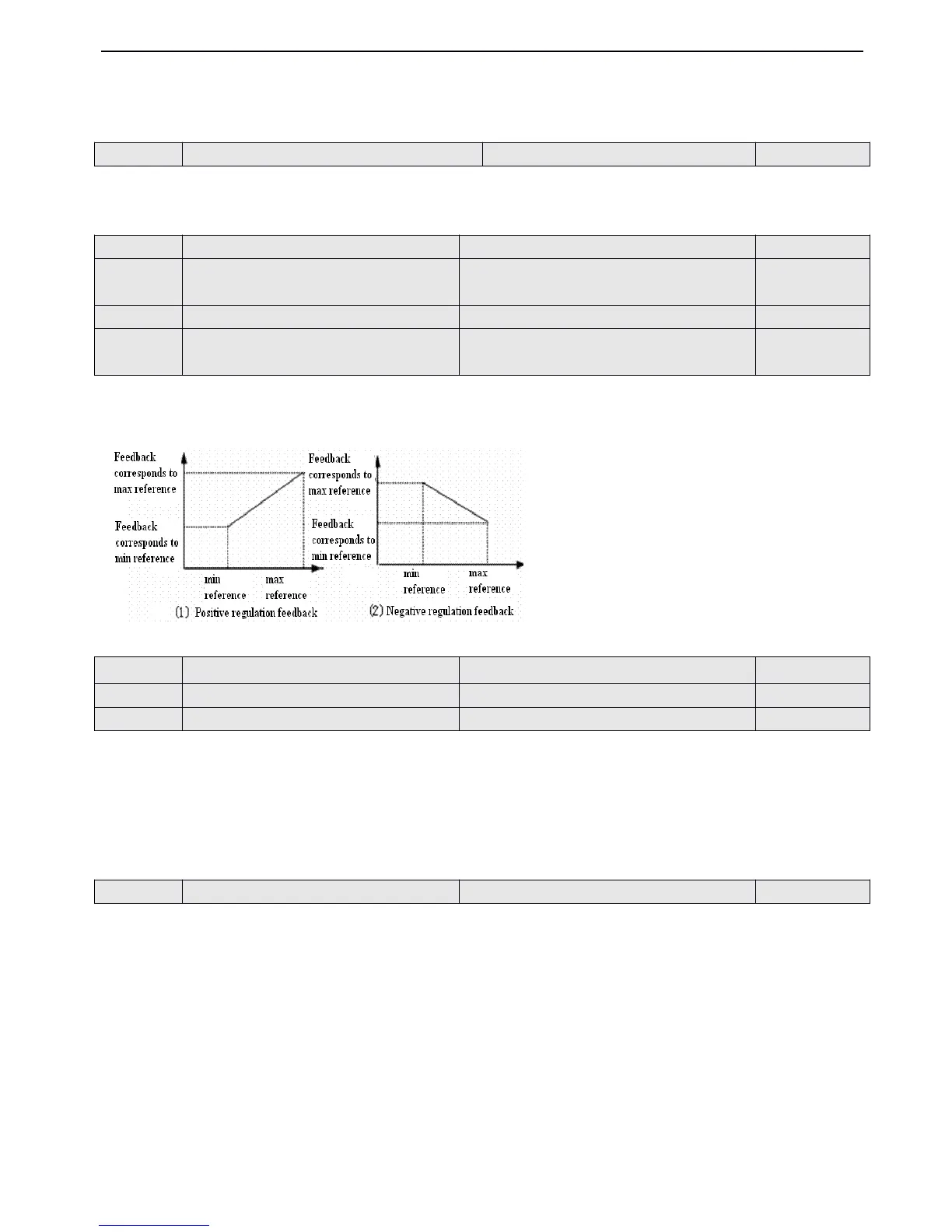
P7.06 ~ P7.09 define the relationship curve of analog close-loop reference and expecti ng feedba ck. The reference value is
the percentage of real value of feedback corresponding to benchmark value ( 10V or 20mA ), a s shown in Fig. 4 - 36 .
Fig.
Fig.
Fig.
Fig. 4-36
4-36
4-36
4-36 reference
reference
reference
reference and
and
and
and feedback
feedback
feedback
feedback curve
curve
curve
curve
The bigger the proportion gain
KP,
the quicker the response, while too bigger of it may lead to surge easily.
As only with proportiaon gian
KP,
deviation can not be eliminated, integral gain KI can be used to to form PI control to
eliminate the deviation
.
The bigge r of the Ki
,
the quicker the response of changing deviation
,
while too big of the Ki may lead
to surge easily.
Sampling cycle T is the sampling cycle of feedback value. PI regulator ca l culate once in every sampling clcle, the longer the
cycle
,
the slower the response.
The
max
deviation value
of
close-loop reference
is
shown
in Fig.4-37, if
the feedback value
is
with
in
this
range,
PI regulator
will
stop
operation.
This function
is
useful
to
improve
accuracy and
s
tab
ility
of
the
system.
 Loading...
Loading...