1 Collision Detection
1.1.3. What happens at a collision
133HAC18154-1 Revision: F
© Copyright 2004-2008 ABB. All rights reserved.
1.1.3. What happens at a collision
Overview
When the collision detection is triggered, the robot will stop as quickly as possible. Then it
will move in the reverse direction to remove residual forces. The program execution will stop
with an error message. The robot remains in the state motors on so that program execution
can be resumed after the collision error message has been acknowledged.
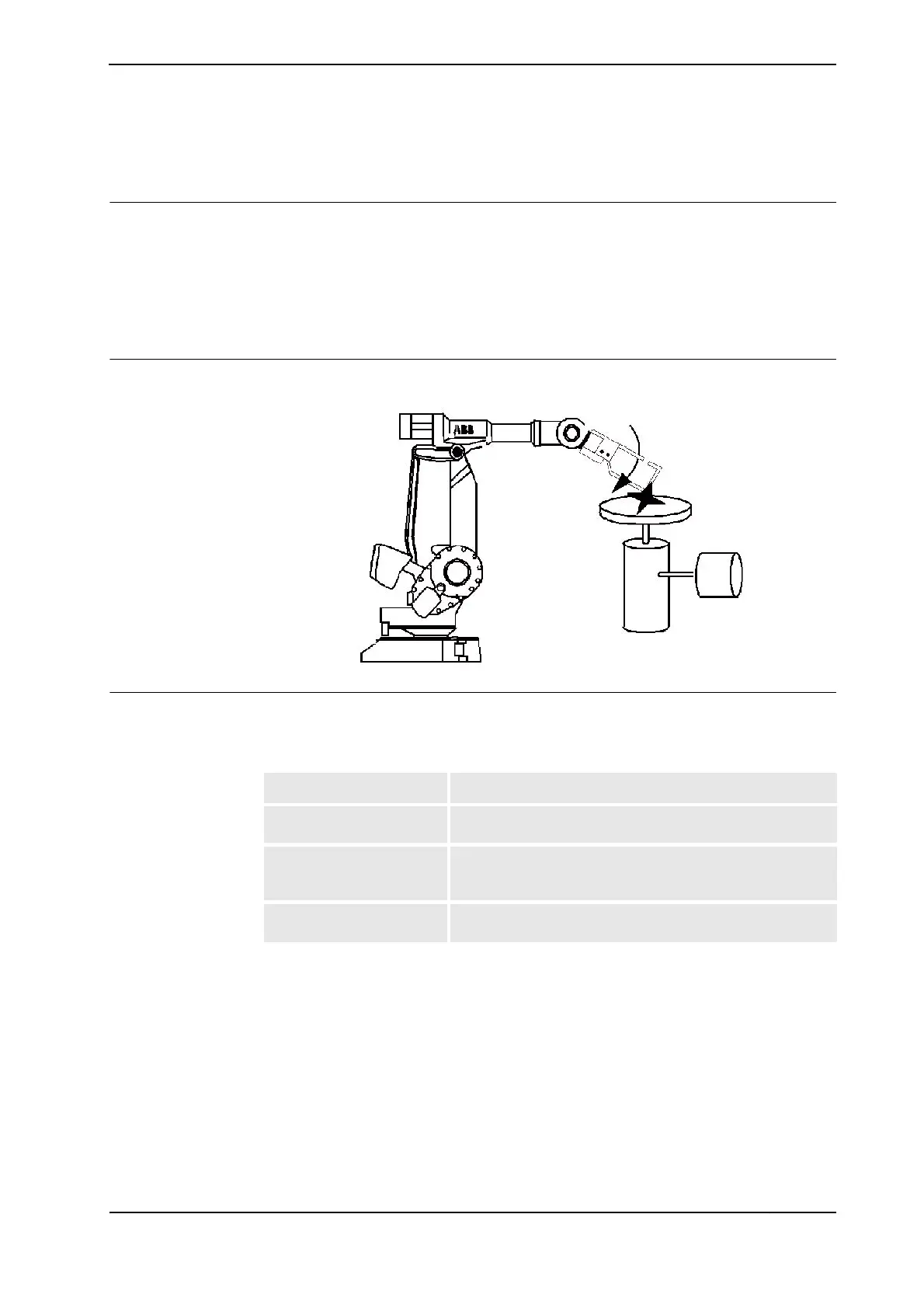
A typical collision is illustrated below.
Collision illustration
xx0300000361
Robot behavior after a collision
This list shows the order of events after a collision. For an illustration of the sequence, see the
diagram below.
When ... then ...
the collision is detected the motor torques are reversed and the mechanical brakes
applied in order to stop the robot
the robot has stopped the robot moves in reversed direction a short distance along
the path in order to remove any residual forces which may be
present if a collision or jam occurred
the residual forces are
removed
the robot stops again and remains in the motors on state
Continues on next page