2 Machine Synchronization
2.1.3. Synchronization features
273HAC18154-1 Revision: F
© Copyright 2004-2008 ABB. All rights reserved.
2.1.3. Synchronization features
Features
The synchronization option provides the following features:
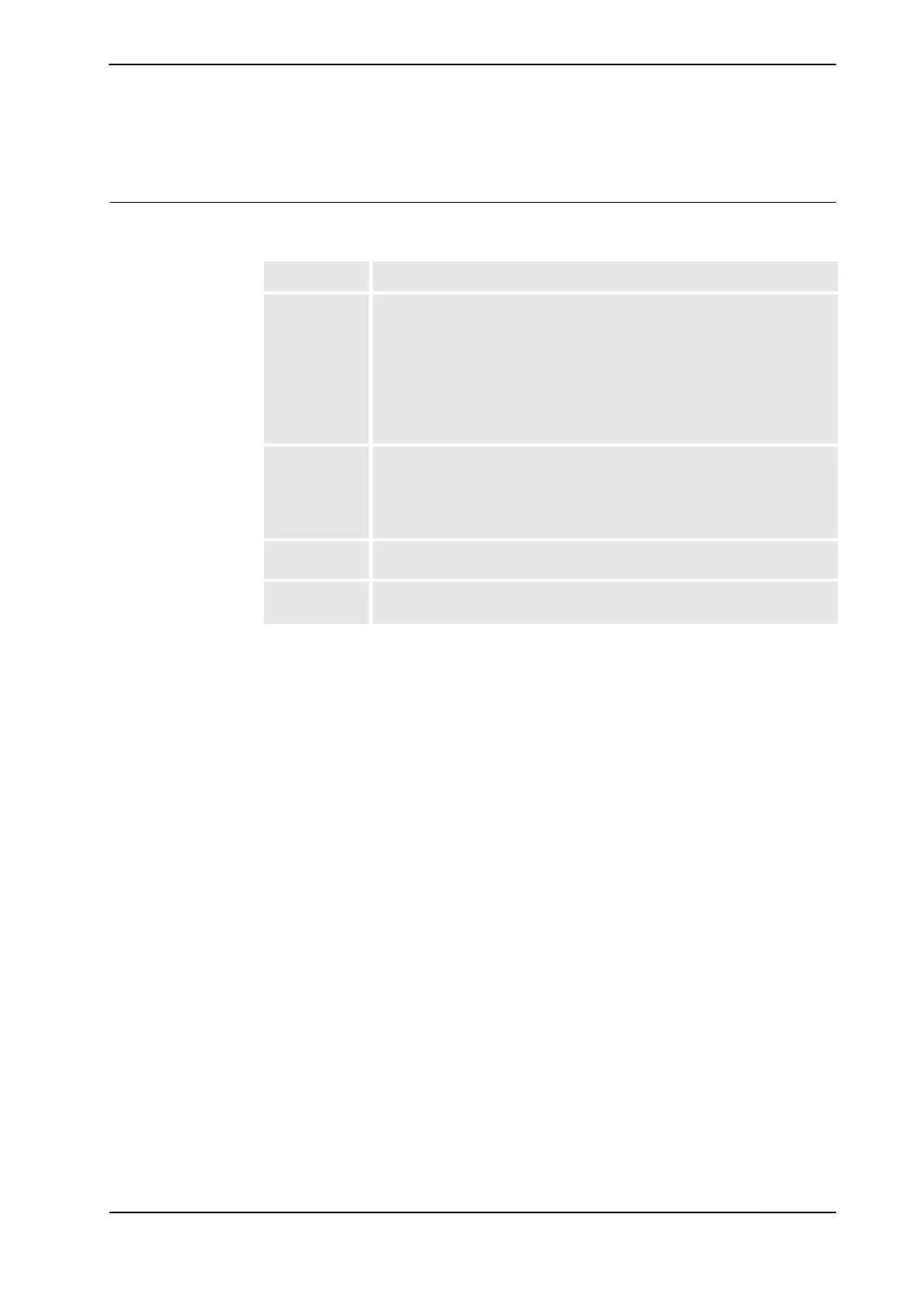
Feature Description
Accuracy In Auto operation at constant sensor speed, the Tool Center Point (TCP) of
the robot will stay within the programmed position corresponding to the
sensor, with an error margin of:
• +/- 50 ms for Sensor Synchronization
• +/- 100 ms for Analog Synchronization
This is valid as long as the robot is within its dynamic limits with the added
sensor motion. This figure depends on the calibration of the robot and
sensor and is applicable for linear synchronization only.
Object queue Only for Sensor Synchronization:
Each time the external device trigger the synchronization switch, a sensor
object is created in the object queue. The encoder interface unit will
maintain the object queue, although for Sensor Synchronization the queue
normally does not contain more than one object.
RAPID access
to sensor data
A RAPID program has access to the current position and speed of the
external device, via the sensor.
Multiple
sensors
Up to 2 sensors are supported.
For Sensor Synchronization, each sensor must have a DSQC 377.

 Loading...
Loading...











