2 Machine Synchronization
2.10.1.11. PrxStartRecord
3HAC18154-1 Revision: F90
© Copyright 2004-2008 ABB. All rights reserved.
2.10.1.11. PrxStartRecord
Usage
Resets all profile data and records a new profile of the sensor movement as soon as
sensor_start_signal is set.
To be able to make a recording it is important to first make a connection to a sensor
(mechanical unit whose speed affects the speed of the robot). This means that a
WaitSensor
instruction has to be executed before the recording starts.
Basic example
ActUnit SSYNC1;
WaitSensor SSYNC1;
PrxStartRecord SSYNC1, 1, PRX_PROFILE_T1;
WaitTime 0.2;
SetDO do_startstop_machine 1;
Signal do_startstop_machine, in this example, starts the sensor movement. Profile of the
sensor is recorded as soon as the machine sets the signal sensor_start_signal.
Arguments
PrxStartRecord MechUnit, Record_duration, Profile_type
MechUnit
Data type: mechunit
The moving mechanical unit object to which the robot movement is synchronized.
Record_duration
Data type: num
Specifies the duration of record in seconds. It must be between 0.1 and Pos Update time *
300. If the value 0 is used, the instruction
PrxStopRecord must be used to stop the
recording.
Profile_type
Data type: num
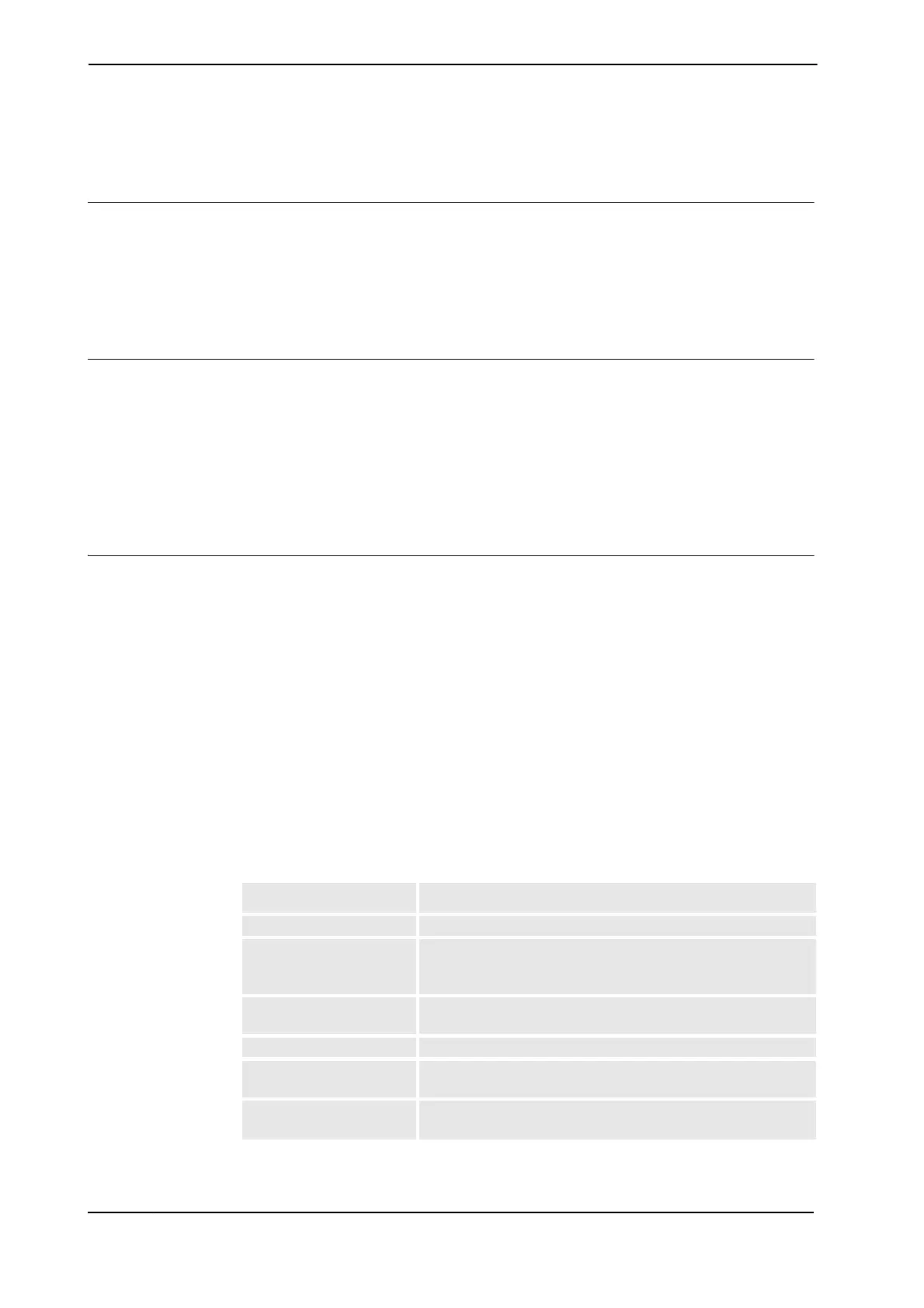
Possible value and their explanation is listed below:
Value Description
PRX_INDEX_PROF Record is started by sensor_start_signal.
PRX_START_ST_PR A start and stop movement can be recorded.
sensor_start_signal is used to record start movement and
sensor_stop_signal is used to record stop movement.
PRX_STOP_ST_PROF Same as for PRX_START_ST_PR only different orders on
signals.The sensor_stop_signal is used first.
PRX_STOP_M_PROF The recording is started by sensor_stop_signal.
PRX_HPRESS_PROF For recording hydraulic press (where sensor position zero
corresponds to the press being open).
PRX_PROFILE_T1 For recording IMM or other machine (where sensor position
zero corresponds to the press being closed).
Continues on next page
 Loading...
Loading...












