2 Machine Synchronization
2.2.1.2. Encoder Description
313HAC18154-1 Revision: F
© Copyright 2004-2008 ABB. All rights reserved.
2.2.1.2. Encoder Description
Overview
The encoder provides a series of pulses indicating the motion detected by the sensor. This is
used to synchronize the motion between the robot and the external device.
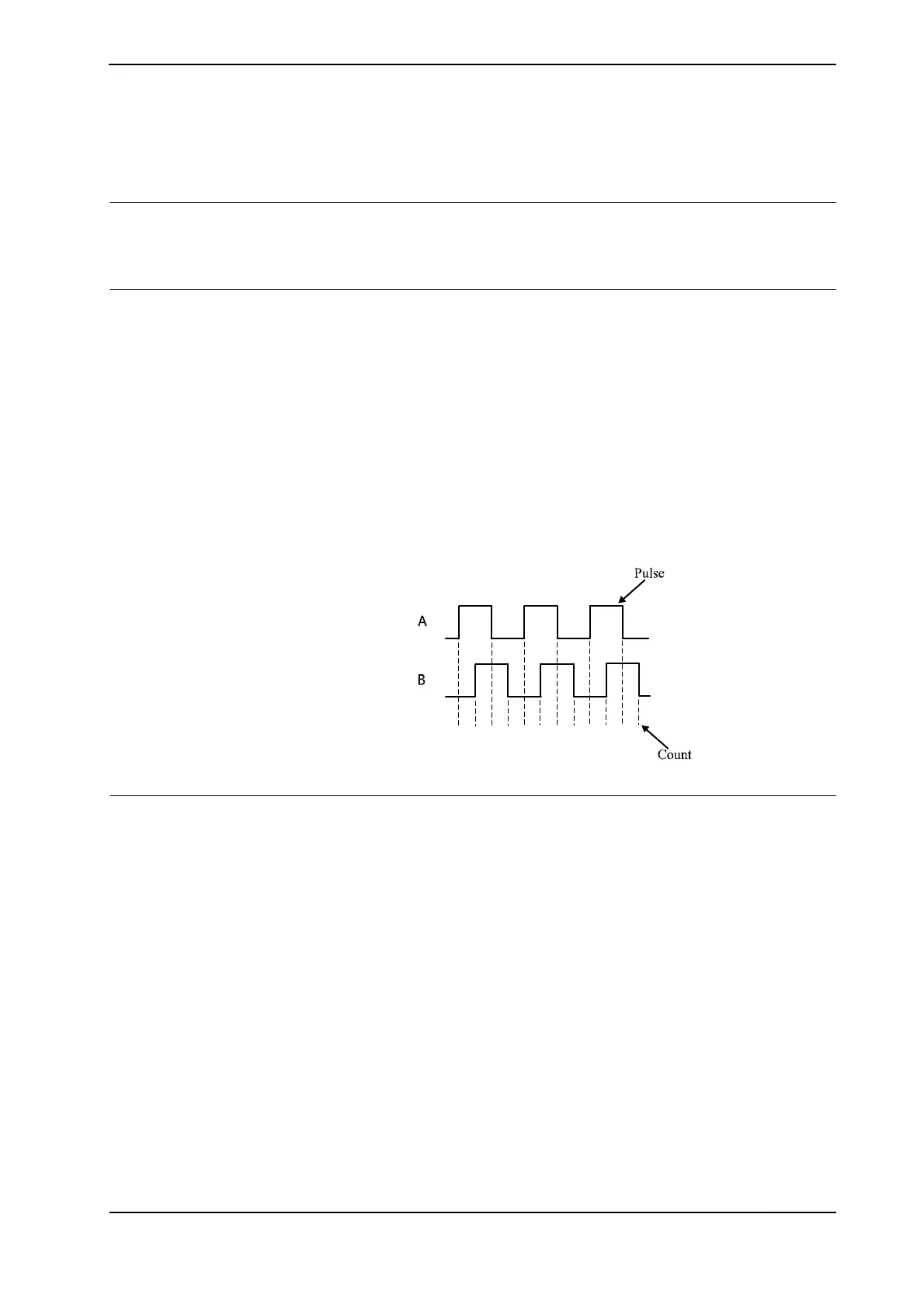
Pulse channels
The encoder has two pulse channels, A and B which differ in phase by 90°. Each channel will
send a fixed number of pulses per revolution depending on the construction of the encoder.
• The number of pulses per revolution for the encoder must be selected in relation to the
gear reduction between the moving devices.
• The pulse ratio from the encoder should be in the range of 1250 - 2500 pulses per
meter of sensor motion.
• The pulses from channel A and B are used in quadrature to multiply the pulse ratio by
four to get counts.
This means that the control software will measure 5000 - 10000 counts per meter for an
encoder with the pulse ratio 1250 - 2500.
en0300000556
Synchronization
To get an accurate synchronization, the movements of the external device must remain within
some limits relative to robot movements. For every meter the robot moves, the external
device movement must be between 0.2 and 5 meters (or radians).

 Loading...
Loading...











