2 Machine Synchronization
2.9.1. RAPID components
3HAC18154-1 Revision: F72
© Copyright 2004-2008 ABB. All rights reserved.
2.9 Programming and configuration data
2.9.1. RAPID components
About the RAPID components
This is an overview of all the instructions and functions in Machine Synchronization. For
more information, see respective instruction in RAPID reference information on page 78.
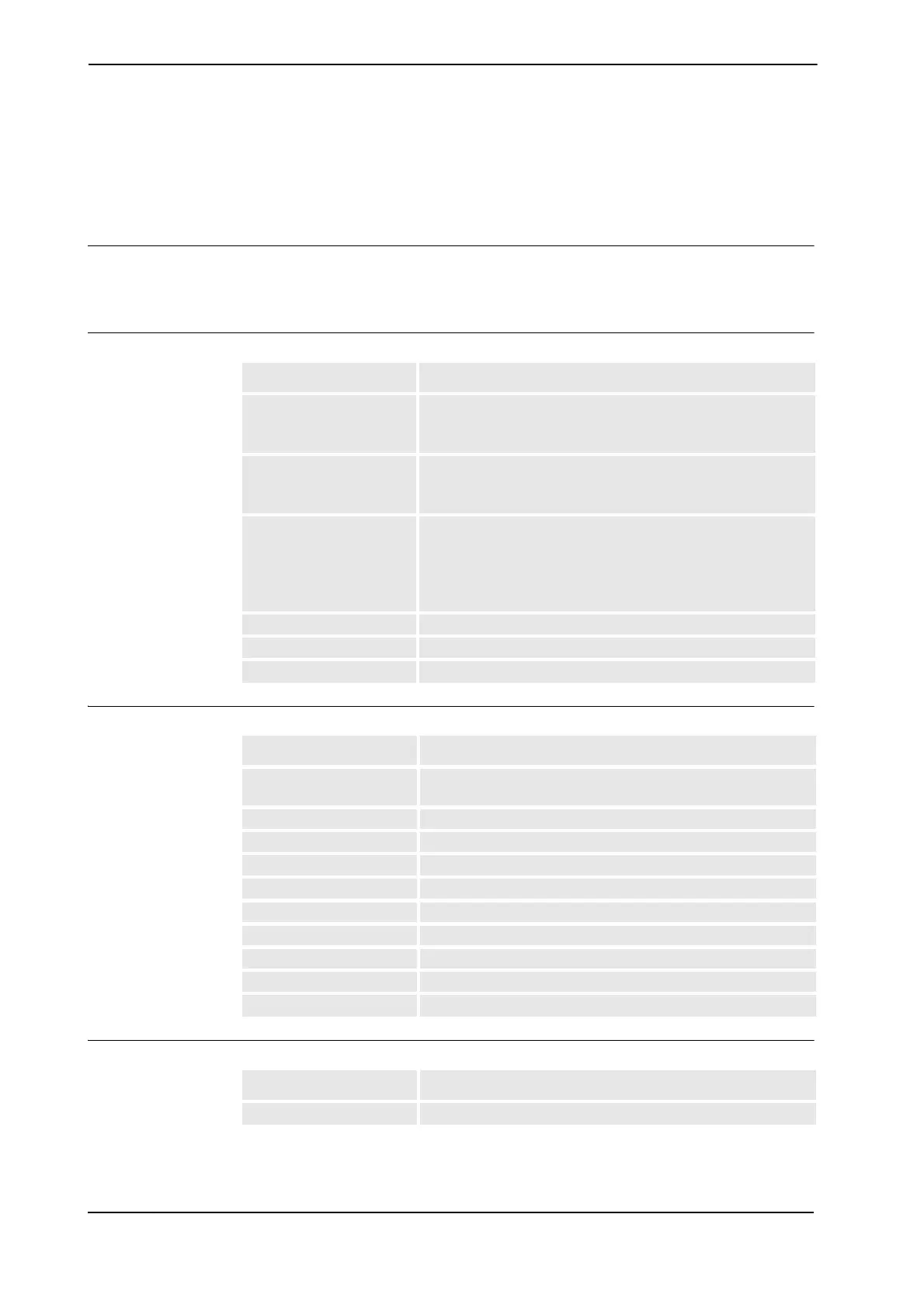
General synchronization instructions
Instructions for handling recordings
Functions for handling recordings
Instruction Description
WaitSensor WaitSensor is used to:
• connect to an object in the start window on the sensor
mechanical unit.
SyncToSensor SyncToSensor is used to:
• start or stop synchronization of robot movement to
sensor movement.
DropSensor DropSensor is used to:
• disconnect from the current object and make the
program ready for the next.
DropSensor is only used for Sensor Synchronization. Do not
use DropSensor for Analog Synchronization.
PrxResetPos Reset the zero position of the sensor.
PrxSetPosOffset Set a reference position for the sensor.
PrxSetSyncalarm Set pulse length for sync_alarm_signal.
Instruction Description
PrxStartRecord Starts a recording of the sensor movement as soon as the
sensor_start_signal is set.
PrxStopRecord Stops the recording of the sensor movement.
PrxActivRecord Activates the record that was just recorded.
PrxDeactRecord Deactivates the active record.
PrxStoreRecord Saves active record to file.
PrxActivAndStoreRecord Activates and saves record to file.
PrxUseFileRecord Loads and activates a record from file.
PrxResetRecords Resets and deactivates all records.
PrxDbgStoreRecord Save a non active record for debug.
PrxSetRecordSampleTime Set sample time for recording.
Instruction Description
PrxGetMaxRecordpos Returns the maximum position (in mm) of the active record.
Continues on next page
 Loading...
Loading...












