2 Machine Synchronization
2.5.2. The concept of robot to robot synchronization
533HAC18154-1 Revision: F
© Copyright 2004-2008 ABB. All rights reserved.
2.5.2. The concept of robot to robot synchronization
Description
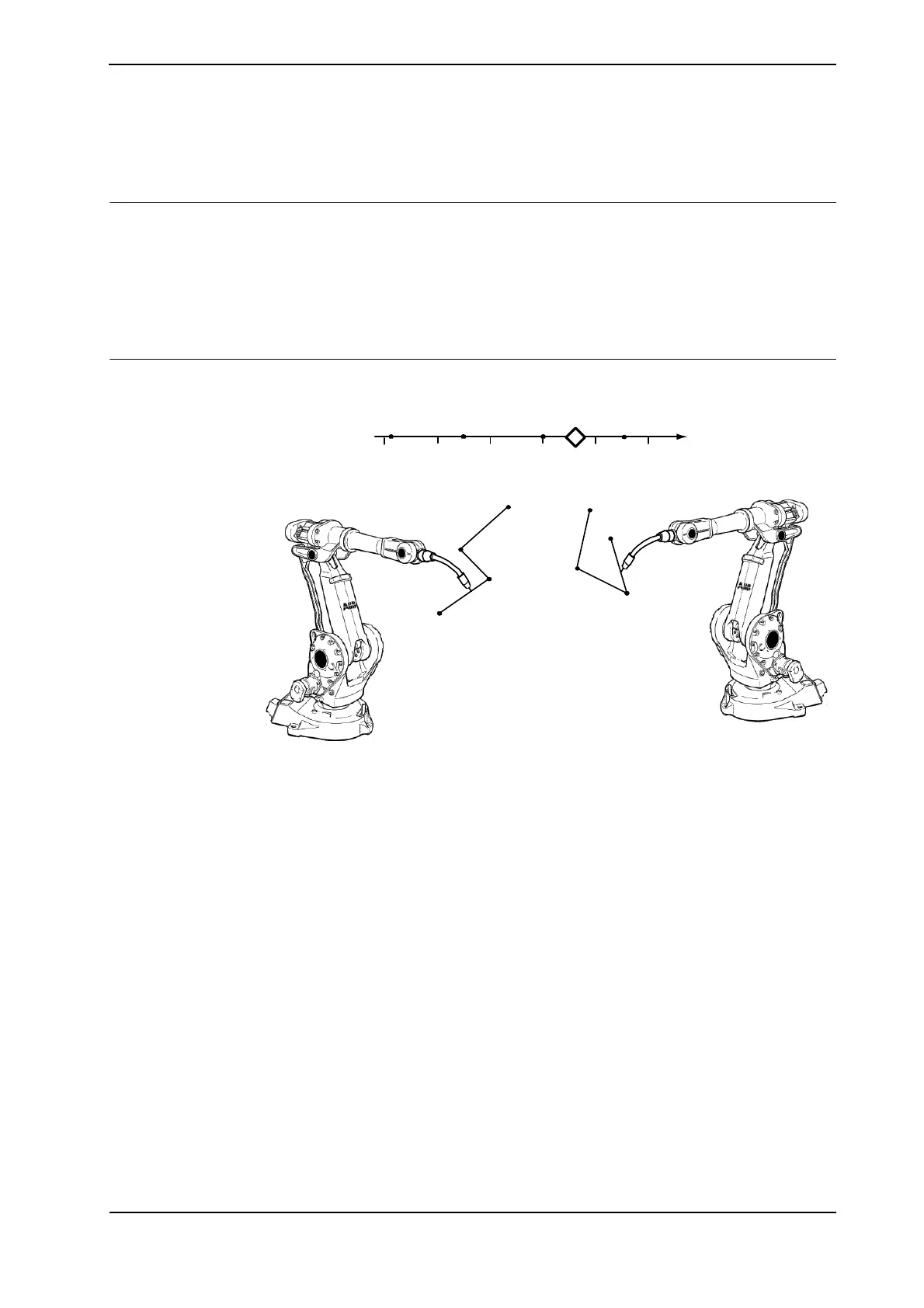
The basic idea of robot to robot synchronization is that two robot should use a common virtual
sensor. The master robot controls the virtual motion of this sensor. The slave robot uses the
sensor’s virtual position and speed to adjust its speed.
The synchronization is achieved by defining positions where the two robots should be at the
same time, and assigning a sensor value for each of these points.
Illustration
xx0400001145
0
200 400
800
600
1000
A
B
1
4
3
2
1
2
3
4
12
3
4

 Loading...
Loading...











