1 Collision Detection
1.2.1. System parameters
153HAC18154-1 Revision: F
© Copyright 2004-2008 ABB. All rights reserved.
1.2 Configuration and programming facilities
1.2.1. System parameters
About system parameters
The parameters for Collision Detection do not require a warm start to take effect.
For more information about the parameters, see Technical reference manual - System
parameters.
Motion Supervision
These parameters belong to the type Motion Supervision in the topic Motion.
Motion System
These parameters belong to the topic Motion and the type Motion System.
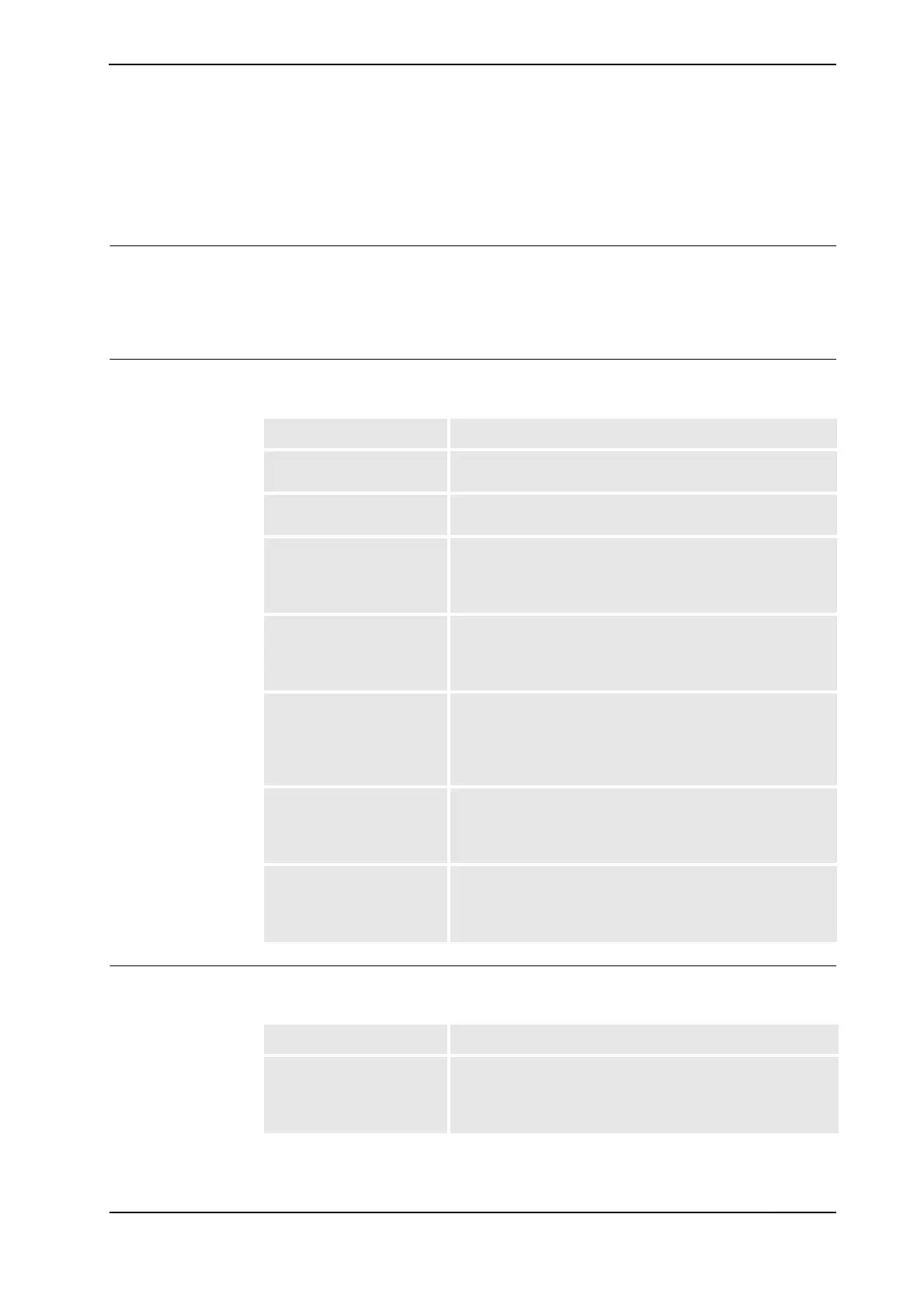
Parameter Description
Path Collision Detection Turn the collision detection On or Off for program execution.
Path Collision Detection is by default set to On.
Jog Collision Detection Turn the collision detection On or Off for jogging.
Jog Collision Detection is by default set to On.
Path Collision Detection
Level
Modifies the Collision Detection supervision level for program
execution by the specified percentage value. A large
percentage value makes the function less sensitive.
Path Collision Detection Level is by default set to 100%.
Jog Collision Detection
Level
Modifies the Collision Detection supervision level for jogging
by the specified percentage value. A large percentage value
makes the function less sensitive.
Jog Collision Detection Level is by default set to 100%.
Collision Detection Memory Defines how much the robot moves in reversed direction on
the path after a collision, specified in seconds. If the robot
moved fast before the collision it will move away a larger
distance than if the speed was slow.
Collision Detection Memory is by default set to 75 ms.
Manipulator Supervision Turns the supervision for the loose arm detection on or off for
IRB 340 and IRB 360. A loose arm will stop the robot and
cause an error message.
Manipulator Supervision is by default set to On.
Manipulator Supervision
Level
Modifies the supervision level for the loose arm detection for
the manipulators IRB 340 and IRB 360. A large value makes
the function less sensitive.
Manipulator Supervision Level is by default value set to 100%.
Parameter Description
Motion Supervision Max
Level
Set the maximum level to which the total collision detection
tune level can be changed. It is by default set to 300%.
Motion Supervision Max Level is only available if the system is
installed in Service mode.
 Loading...
Loading...












