430 Rockwell Automation Publication 2198-UM002G-EN-P - February 2019
Appendix E Motor Control Feature Support
SLAT Max Speed/Torque
SLAT Max Speed/Torque is a special mode of operation primarily used in web
handling applications. The drive typically operates as a torque regulator,
provided that the TorqueTrim attribute is greater than the torque output due to
the velocity regulator's control effort. The drive can automatically enter
velocity regulation based on conditions within the velocity regulator and the
magnitude of the velocity regulator's output relative to the torque reference.
When used for SLAT control, an application dependent VelocityCommand
value is applied to the drive via an MAJ instruction (2198-xxxx-ERS3 series A
drives, firmware 7.001 or later) or MDS instruction (2198-xxxx-ERS4 and
2198-xxxx-ERS3 series B drives, firmware 9.001 or later). An application
dependent TorqueTrim value is also applied via cyclic write. Under normal
operation, VelocityCommand is set to a level that results in the velocity
regulator's control effort becoming saturated when the motor's speed is
mechanically limited. The TorqueReference value equals the TorqueTrim
value, resulting in a negative VelocityError value.
Should the mechanical speed limitation be removed (example: web break), the
motor accelerates and VelocityError becomes positive. At this time, a forced
transition to velocity regulation occurs, and the motor's speed is regulated to
the VelocityCommand attribute.
The axis remains in velocity regulation until VelocityError is less than
SLATSetPoint for a time specified by SLATTimeDelay. At this point, the axis
returns to operating as a torque regulator.
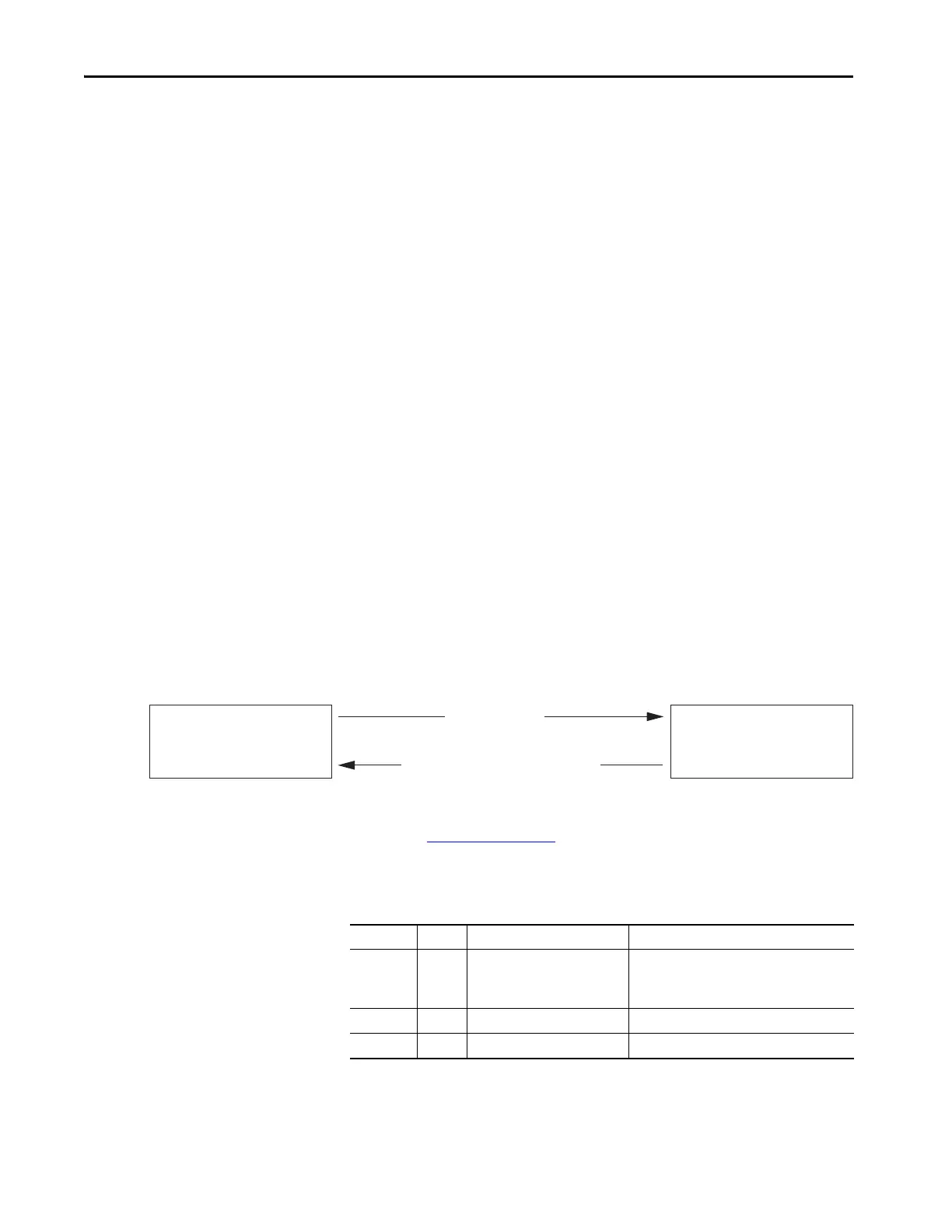
Figure 230 - SLAT Max Speed/Torque
See the Integrated Motion on the EtherNet/IP Network Reference Manual,
publication MOTION-RM003
, for more information on SLAT attributes.
SLAT Attributes
Select Maximum of Velocity Loop Output
or Torque Command
(speed control is OFF)
Select Velocity Loop Output
(speed control is ON)
Velocity Error > 0
Velocity Error < SLAT Setpoint for SLAT Time
ID Access Attribute Conditional Implementation
833 Set SLAT Configuration
0 = SLAT Disable
(1)
1 = SLAT Min Speed/Torque
2 = SLAT Max Speed/Torque
(1) SLAT Disable, when viewed in version 28.00 (and earlier) of the Logix Designer application, reads Torque Only.
834 Set SLAT Set Point Velocity Units
835 Set SLAT Time Delay Seconds

 Loading...
Loading...







