104 Rockwell Automation Publication 2080-UM002K-EN-E - March 2019
Chapter 7 Motion Control
Axis Elements and Data Types
Axis_Ref Data Type
Axis_Ref is a data structure that contains information on a motion axis. It is used
as an input and output variable in all motion function blocks. One axis_ref
instance is created automatically in the Connected Components Workbench
software when the user adds one motion axis to the configuration.
The user can monitor this variable in controller debug mode through the
software when the motion engine is active, or in the user application as part of
user logic. It can also be monitored remotely through various communication
channels.
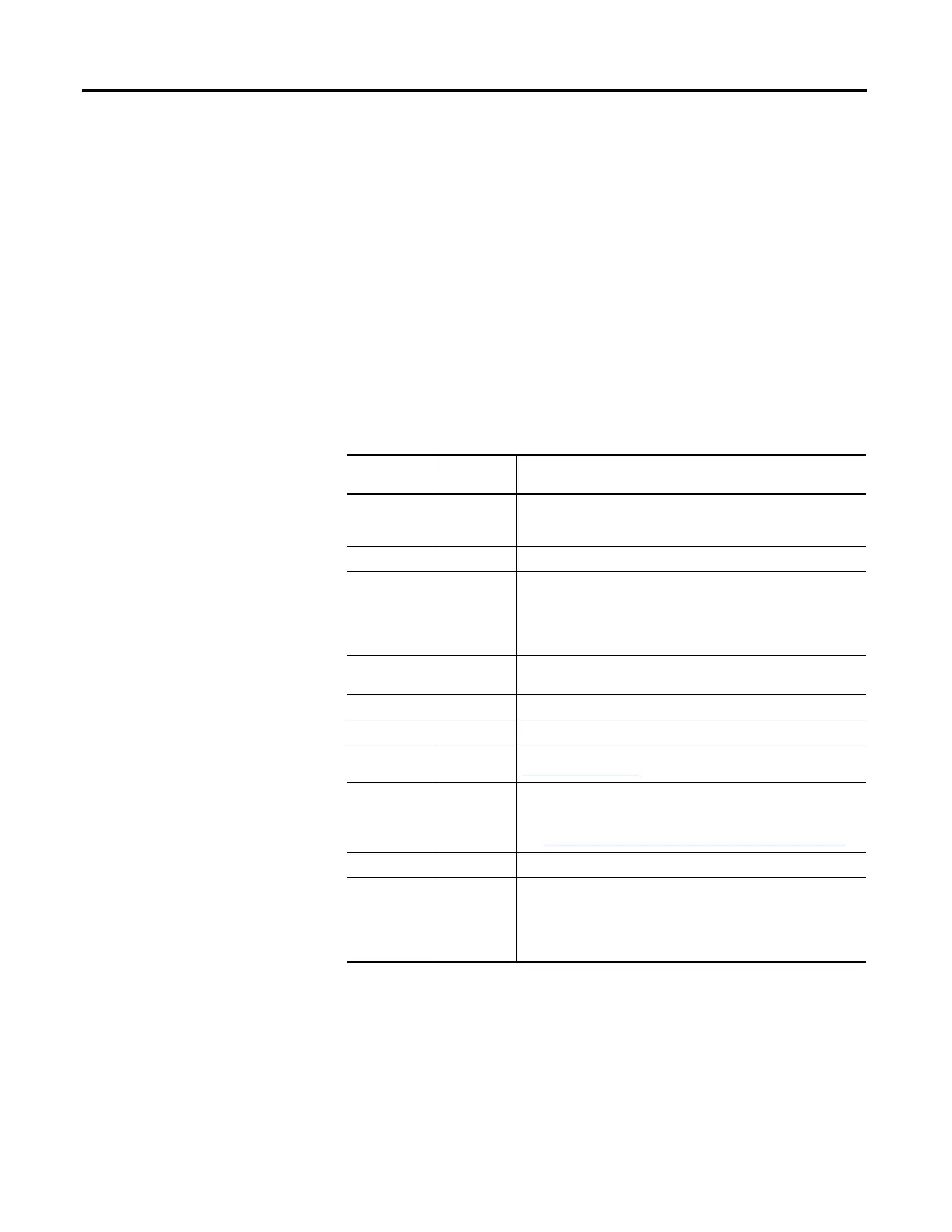
Data Elements for Axis_Ref
Element
name
Data Type Description
Axis_ID UINT8 The logic axis ID automatically assigned by the Connected
Components Workbench software. This parameter cannot be
edited or viewed by user.
ErrorFlag UINT8 Indicates whether an error is present in the axis.
AxisHomed UINT8 Indicates whether homing operation is successfully executed for
the axis or not.
When the user tries to redo homing for an axis with AxisHomed
already set (homing performed successfully), and the result is not
successful, the AxisHomed status will be cleared.
ConsVelFlag UINT8 Indicates whether the axis is in constant velocity movement or not.
Stationary axis is not considered to be in constant velocity.
AccFlag UINT8 Indicates whether the axis is in an accelerating movement or not.
DecFlag UINT8 Indicates whether the axis is in a decelerating movement or not.
AxisState UINT8 Indicates the current state of the axis. For more information, see
Axis States
on page 99.
ErrorID UINT16 Indicates the cause for axis error when error is indicated by
ErrorFlag. This error usually results from motion function block
execution failure.
See Motion Function Block and Axis status Error ID
on page 107.
ExtraData UINT16 Reserved.
TargetPos REAL
(float)
(1)
Indicates the final target position of the axis for MoveAbsolute and
MoveRelative function blocks.
For MoveVelocity, Stop, and Halt function blocks, TargetPos is 0
except when the TargetPos set by previous position function blocks
is not cleared.
 Loading...
Loading...








