Rockwell Automation Publication 750-PM001N-EN-P - February 2017 263
Embedded Feature and Option Module Parameters Chapter 5
Single Incremental Encoder
Module Parameters
File
Group
No. Display Name
Full Name
Description
Values
Read-Write
Data Type
Single Incremental Encoder
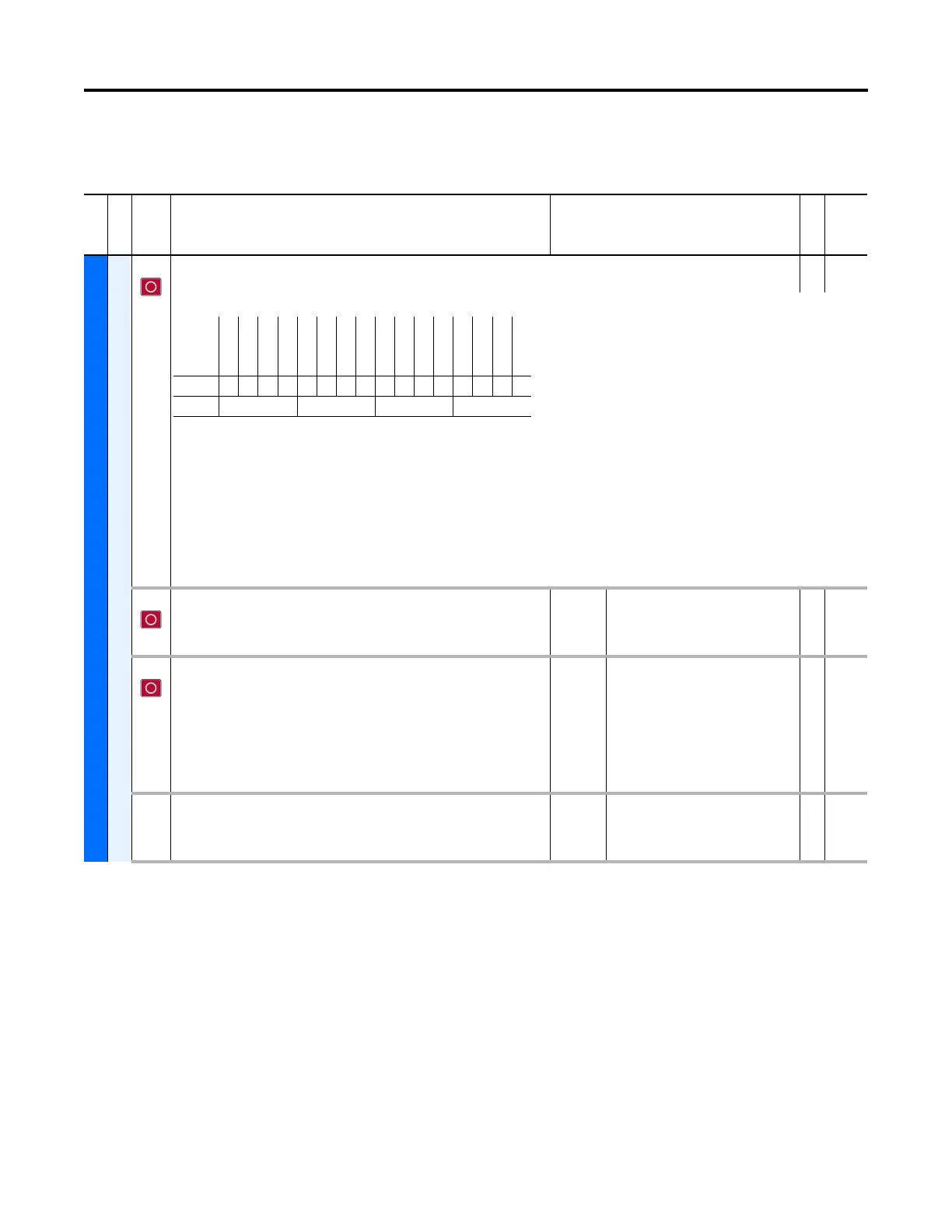
1 Encoder Cfg
Encoder Configure
RW 16-bit
Integer
Configures the direction, speed calculation method, signal type and active encoder channels.
Bit 0 “Z Channel Enbl” – Configures the Channel Z to be used and monitored for Phase Loss. A value of 0 = the Z channel will be ignored. Must be set if the encoder
marker pulse is used.
Bit 1 “A Chan Only” – Configures the module to use only the A channel, and ignore the B channel. In this mode, direction cannot be determined, and the position
counter will always count up.
Bit 2 “Edge Mode” – Configure the module to use AB edge time data for speed calculation rather than accumulated count. Recommended for low speed operation.
Bit 3 “Inv Home In” – Configures the home input to be inverted. 1 = inverted, 0 = not inverted
Bit 4 “Single Ended” – Configure when the A Quad B encoder has single ended signals. In this mode, Phase Loss detection is disabled. 0 = Differential, 1 = Single
Ended
Bit 5 “Direction” – Inverts the feedback count up/down associated with a given rotation direction internally. 1 = invert, 0 = do not invert This bit is changed by the
direction test in the Start-Up routine when encoder direction is determined to be incorrect and “Change Logic” is selected when prompted.
2 Encoder PPR
Encoder Pulses Per Revolution
Configures the encoder module for the Pulses Per Revolution (Encoder Lines) of the
incremental encoder.
Default:
Min/Max:
1024
2 / 20000
RW Real
3 Fdbk Loss Cfg
Feedback Loss Configure
Configures how the drive reacts to an error status condition for the feedback.
“Ignore” (0) – No action is taken.
“Alarm” (1) – Type 1 alarm indicated.
“Flt Minor” (2) – Minor fault indicated. If running, drive continues to run.
Enable with P950 [Minor Flt Cfg]. If not enabled, acts like a major fault.
“FltCoastStop” (3) – Major fault indicated. Coast to Stop.
Default:
Options:
3 = “FltCoastStop”
0 = “Ignore”
1 = “Alarm”
2 = “Flt Minor”
3 = “FltCoastStop”
RW Real
4 Encoder Feedback
Encoder Feedback
Displays the position feedback value of the encoder. This can be used as a source for the
main control (Port 0) Feedback Select.
Default:
Min/Max:
0
–/+2147483647
RO Real
Options
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Direction
Single Ended
Inv Home In
Edge Mode
A Chan Only
Z Chan Enbl
Default0000000000000000
Bit 1514131211109876543210
0 = Condition False
1 = Condition True

 Loading...
Loading...



